文章目录
- 1. 系统概览
- 1.1 技术特点
- 1.2 技术栈
- 2. 整体系统架构
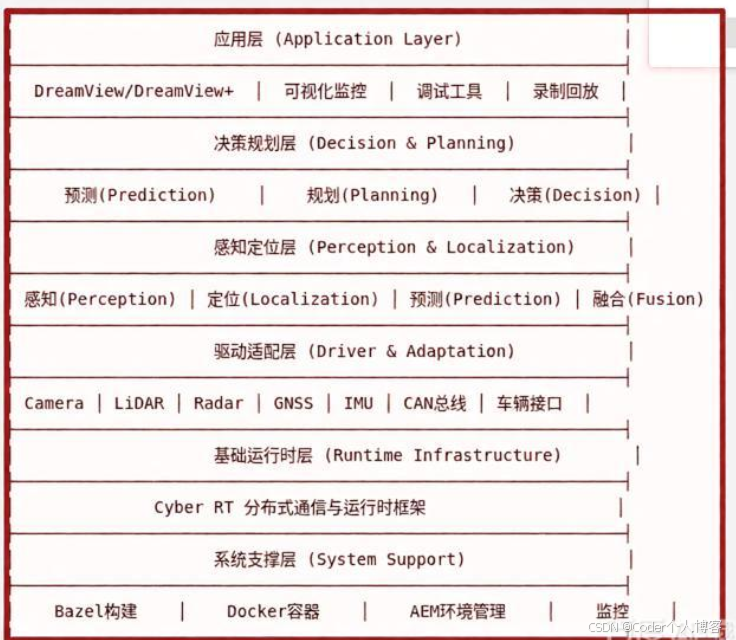
- 2.1 分层架构设计
- 2.2 核心组件关系图
- 3. 核心模块详细分析
- 3.1 Cyber RT运行时框架
- 3.1.1 核心特性
- 3.1.2 关键组件
- 3.2 感知系统架构
- 3.2.1 传感器配置
- 3.2.2 感知流水线
- 3.2.3 算法支持
- 3.3 规划系统架构
- 3.3.1 规划层次
- 3.3.2 规划器类型
- 3.4 控制系统架构
- 3.4.1 控制层次
- 3.4.2 控制算法
- 3.5 定位系统架构
- 3.5.1 定位源
- 3.5.2 融合算法
- 4. 数据流分析
- 4.1 主要数据流
- 4.2 关键消息类型
- 4.2.1 感知消息
- 4.2.2 定位消息
- 4.2.3 规划消息
- 5. 系统部署架构
- 5.1 软件部署模式
- 5.1.1 单机部署
- 5.1.2 分布式部署
- 5.1.3 容器化部署
- 5.2 硬件架构要求
- 5.2.1 计算单元
- 5.2.2 传感器配置
- 6. 性能与安全分析
- 6.1 实时性能指标
- 6.1.1 延迟要求
- 6.1.2 吞吐量指标
- 6.2 安全保障机制
- 6.2.1 功能安全
- 6.2.2 信息安全
- 7. 开发与调试体系
- 7.1 开发工具链
- 7.1.1 构建系统
- 7.1.2 调试工具
- 7.2 测试验证体系
- 7.2.1 测试层次
- 7.2.2 验证方法
- 8. 总结与展望
- 8.1 架构优势
- 8.2 技术趋势
团队博客:汽车电子社区
1. 系统概览
Apollo是百度开发的自动驾驶开放平台,采用模块化、分布式架构设计,为L4级别自动驾驶提供完整的软件解决方案。
1.1 技术特点
- 模块化设计:各功能模块独立,便于开发、测试和部署
- 分布式架构:基于Cyber RT实现高性能分布式通信
- 实时性保障:专为自动驾驶场景优化的低延迟设计
- 跨平台支持:支持x86_64和aarch64架构
- 算法可插拔:支持多种感知、规划、控制算法
1.2 技术栈
- 主要语言:C++17, Python 3.x
- 构建系统:Bazel 3.7.0+
- 通信框架:Cyber RT + FastDDS
- 计算库:Eigen3, OpenCV, PCL
- 机器学习:PyTorch, PaddlePaddle, TensorRT
- 系统依赖:Ubuntu 18.04+, Docker, CUDA/ROCm
2. 整体系统架构
2.1 分层架构设计
2.2 核心组件关系图
3. 核心模块详细分析
3.1 Cyber RT运行时框架
Cyber RT是Apollo的核心通信框架,专为自动驾驶设计:
3.1.1 核心特性
- 高性能通信:基于FastDDS,支持零拷贝内存优化
- 组件化架构:支持模块化开发和部署
- 实时调度:提供多种调度策略保证实时性
- 跨语言支持:C++/Python双语言接口
3.1.2 关键组件
- Node节点:通信的基本单位
- Component组件:功能实现的容器
- Scheduler调度器:任务调度和资源管理
- Channel通道:数据传输的管道
3.2 感知系统架构
多传感器融合感知方案:
3.2.1 传感器配置
- 摄像头:多个视角,覆盖不同距离和角度
- 激光雷达:360°扫描,精确测距
- 毫米波雷达:恶劣天气下的补充感知
3.2.2 感知流水线
原始数据 -> 预处理 -> 特征提取 -> 目标检测 -> 目标跟踪 -> 结果融合 -> 输出目标3.2.3 算法支持
- 视觉算法:YOLO、Faster R-CNN、BEV Detection
- 激光算法:PointPillars、CenterPoint、VoxelNet
- 融合算法:卡尔曼滤波、匈牙利算法、贝叶斯融合
3.3 规划系统架构
分层规划架构,从全局到局部:
3.3.1 规划层次
- 路由规划:从起点到终点的全局路径
- 行为规划:驾驶行为决策(换道、超车等)
- 轨迹规划:具体的时空轨迹
3.3.2 规划器类型
- Lattice Planner:基于采样的解耦规划
- Public Road Planner:公开道路复杂场景
- RTK Planner:循迹规划模式
- Navi Planner:导航模式简化规划
3.4 控制系统架构
分层控制架构:
3.4.1 控制层次
- 路径跟踪:横向控制(方向盘)
- 速度控制:纵向控制(油门/刹车)
- 车辆执行:底层CAN通信
3.4.2 控制算法
- MPC控制:模型预测控制,处理多变量约束
- LQR控制:线性二次调节器,优化控制性能
- PID控制:经典的反馈控制
3.5 定位系统架构
多源融合定位方案:
3.5.1 定位源
- GNSS定位:卫星导航系统
- IMU积分:惯性测量单元
- LiDAR匹配:点云地图匹配
- 视觉里程计:相机运动估计
3.5.2 融合算法
- MSF融合:多传感器紧耦合
- 松耦合融合:独立定位结果的加权融合
- 图优化融合:基于图模型的优化方法
4. 数据流分析
4.1 主要数据流
4.2 关键消息类型
4.2.1 感知消息
message PerceptionObstacles {repeated PerceptionObstacle perception_obstacle; // 障碍物列表optional apollo.common.Header header = 1; // 消息头optional ErrorCode error_code = 2; // 错误码
}4.2.2 定位消息
message LocalizationEstimate {optional apollo.common.Header header = 1;optional Pose pose = 2; // 车辆位姿optional Uncertainty uncertainty = 3; // 不确定性
}4.2.3 规划消息
message ADCTrajectory {repeated TrajectoryPoint trajectory_point; // 轨迹点序列optional DecisionResult decision; // 决策结果optional EStop estop; // 紧急停止
}5. 系统部署架构
5.1 软件部署模式
5.1.1 单机部署
- 所有模块运行在同一台计算单元
- 适用于开发测试和演示场景
- 资源需求:高性能CPU/GPU
5.1.2 分布式部署
- 模块分布在多个计算节点
- 适用于实车部署和云计算
- 支持动态负载均衡
5.1.3 容器化部署
- 基于Docker的标准化部署
- 便于版本管理和环境隔离
- 支持云原生架构
5.2 硬件架构要求
5.2.1 计算单元
- CPU:Intel i7+ 或 AMD Ryzen 7+
- GPU:NVIDIA RTX 2080+ 或 AMD RX 6800+
- 内存:32GB+ DDR4
- 存储:1TB+ NVMe SSD
5.2.2 传感器配置
- 摄像头:6-12个,200万像素
- 激光雷达:主雷达+补盲雷达
- 毫米波雷达:前向+角雷达
- GNSS/IMU:高精度组合导航
6. 性能与安全分析
6.1 实时性能指标
6.1.1 延迟要求
- 感知延迟:< 100ms
- 规划延迟:< 50ms
- 控制延迟:< 20ms
- 端到端延迟:< 200ms
6.1.2 吞吐量指标
- 数据带宽:> 1GB/s
- 消息频率:100Hz核心数据
- 并发处理:支持多传感器数据并行
6.2 安全保障机制
6.2.1 功能安全
- 冗余设计:关键系统双重冗余
- 故障检测:实时健康监控
- 故障恢复:自动降级和恢复
6.2.2 信息安全
- 通信加密:TLS端到端加密
- 访问控制:基于角色的权限管理
- 安全启动:可信启动链
7. 开发与调试体系
7.1 开发工具链
7.1.1 构建系统
- Bazel:高性能构建工具
- Docker:标准化开发环境
- AEM:Apollo环境管理器
7.1.2 调试工具
- DreamView:可视化调试界面
- Cyber_monitor:系统监控工具
- Record工具:数据录制回放
7.2 测试验证体系
7.2.1 测试层次
- 单元测试:模块级功能测试
- 集成测试:多模块协同测试
- 系统测试:端到端功能验证
- 仿真测试:大规模场景测试
7.2.2 验证方法
- 实车测试:封闭场地和公开道路
- 仿真测试:高保真仿真环境
- 数据回放:历史数据测试
8. 总结与展望
8.1 架构优势
1. 模块化设计:便于独立开发、测试和升级
2. 高性能通信:Cyber RT专为自动驾驶优化
3. 算法丰富:支持多种先进算法
4. 开源生态:活跃的社区和丰富的文档
5. 工业级质量:经过大规模实车验证
8.2 技术趋势
1. AI驱动:更多深度学习算法集成
2. 云端协同:车路云一体化架构
3. 标准化:接口和协议标准化
4. 高等级自动驾驶:向L5级别演进
5. 产业化:成本优化和大规模量产
Apollo 9.0.0的整体架构设计体现了自动驾驶系统的复杂性需求,通过模块化、分布式的设计理念,为L4级别自动驾驶提供了完整、可靠、高性能的软件解决方案。