1. 梁单元刚度矩阵计算
梁单元刚度矩阵描述了单元在局部坐标系下的力学特性,其通用形式为:
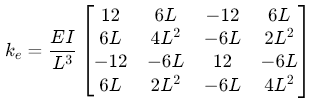
其中 \(E\)为弹性模量,\(I\)为惯性矩,\(L\)为单元长度。
MATLAB实现代码:
function k = beam_stiffness(E, I, L)k = (E*I/L^3) * [12, 6*L, -12, 6*L;6*L, 4*L^2, -6*L, 2*L^2;-12, -6*L, 12, -6*L;6*L, 2*L^2, -6*L, 4*L^2];
end
2. 总体刚度矩阵组装
总体刚度矩阵通过叠加各单元刚度矩阵得到。假设结构有 N个节点,每个节点有3个自由度(ux, uy, θz),则总体刚度矩阵维度为 3N×3N。
组装步骤:
- 初始化全局矩阵:
K = zeros(3*N, 3*N); - 遍历每个单元:
- 确定单元节点全局编号(如节点 i和 j)。
- 计算单元刚度矩阵 ke。
- 将 ke的元素叠加到全局矩阵对应位置。
MATLAB实现代码:
% 示例:两单元梁结构(节点1-2-3)
E = 210e9; % 弹性模量 (Pa)
I = 5e-6; % 惯性矩 (m^4)
L1 = 2; % 单元1长度
L2 = 3; % 单元2长度% 计算单元刚度矩阵
k1 = beam_stiffness(E, I, L1);
k2 = beam_stiffness(E, I, L2);% 总体刚度矩阵组装
N_nodes = 3; % 总节点数
K = zeros(3*N_nodes, 3*N_nodes);% 定义单元自由度映射
def_map = @(i, j) [3*i-2:3*i, 3*j-2:3*j];% 组装单元1(节点1-2)
K(def_map(1,2), def_map(1,2)) = K(def_map(1,2), def_map(1,2)) + k1;% 组装单元2(节点2-3)
K(def_map(2,3), def_map(2,3)) = K(def_map(2,3), def_map(2,3)) + k2;disp('总体刚度矩阵:');
disp(K);
3. 边界条件处理
对固定节点(如节点1全约束),需修改全局刚度矩阵:
% 固定节点1的所有自由度
fixed_dofs = [1,2,3]; % 节点1的3个自由度
free_dofs = setdiff(1:3*N_nodes, fixed_dofs);% 矩阵缩聚
K_reduced = K(free_dofs, free_dofs);
4. 求解位移与支反力
施加荷载后求解位移:
% 示例荷载(节点3受集中力)
F = zeros(3*N_nodes, 1);
F(3 * 3-2) = 1000; % 节点3的x方向力% 求解位移
U = K_reduced \ F(free_dofs);% 扩展位移结果到全节点
U_full = zeros(3*N_nodes, 1);
U_full(free_dofs) = U;% 计算支反力
F_reactions = K * U_full - F;
5. 完整代码示例
% 参数定义
E = 210e9; % 弹性模量 (Pa)
I = 5e-6; % 惯性矩 (m^4)
nodes = [0,0; 2,0; 5,0]; % 节点坐标 (x,y)
elements = [1,2; 2,3]; % 单元连接关系% 初始化全局刚度矩阵
N_nodes = size(nodes, 1);
K = zeros(3*N_nodes, 3*N_nodes);% 遍历单元并组装
for e = 1:size(elements, 1)i = elements(e,1); j = elements(e,2);L = norm(nodes(j,:) - nodes(i,:));k_e = beam_stiffness(E, I, L);K(def_map(i,j), def_map(i,j)) = K(def_map(i,j), def_map(i,j)) + k_e;
end% 边界条件(固定节点1)
fixed_dofs = [1,2,3];
free_dofs = setdiff(1:3*N_nodes, fixed_dofs);
K_reduced = K(free_dofs, free_dofs);% 施加荷载(节点3受集中力)
F = zeros(3*N_nodes, 1);
F(3 * 3-2) = 1000; % 节点3的x方向力% 求解位移
U = K_reduced \ F(free_dofs);
U_full = zeros(3*N_nodes, 1);
U_full(free_dofs) = U;% 输出结果
disp('节点位移:');
disp(U_full);
disp('支反力:');
disp(K * U_full - F);
参考代码 利用MATLAB计算梁单元刚度矩阵,并组装成总体刚度矩阵 www.youwenfan.com/contentcnq/54607.html
关键点说明
- 自由度映射:每个节点有3个自由度(x位移、y位移、转角),需正确映射到全局矩阵。
- 矩阵稀疏性:实际工程中建议使用稀疏矩阵存储(
sparse函数)以提高效率。 - 单元方向:若梁单元方向与全局坐标系不一致,需通过坐标转换矩阵调整刚度矩阵。