本文帮助大家快速配置DDS核,并给出相应的仿真代码观察相应的波形。没有多余的讲解,先用起来再说。
DDS核产生正弦波
产生的正弦波效果如图: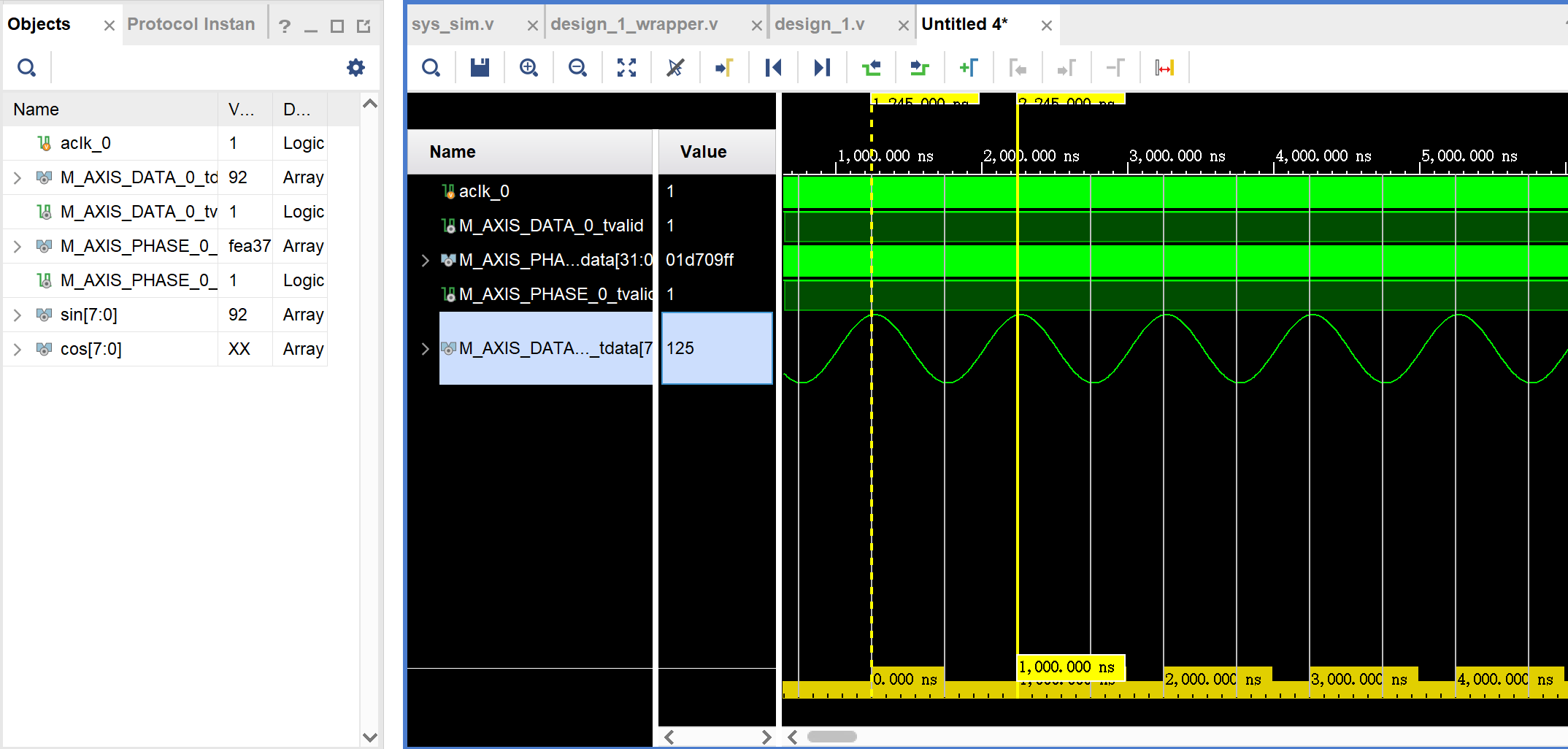
是一个1M的正弦波
对IP核的配置
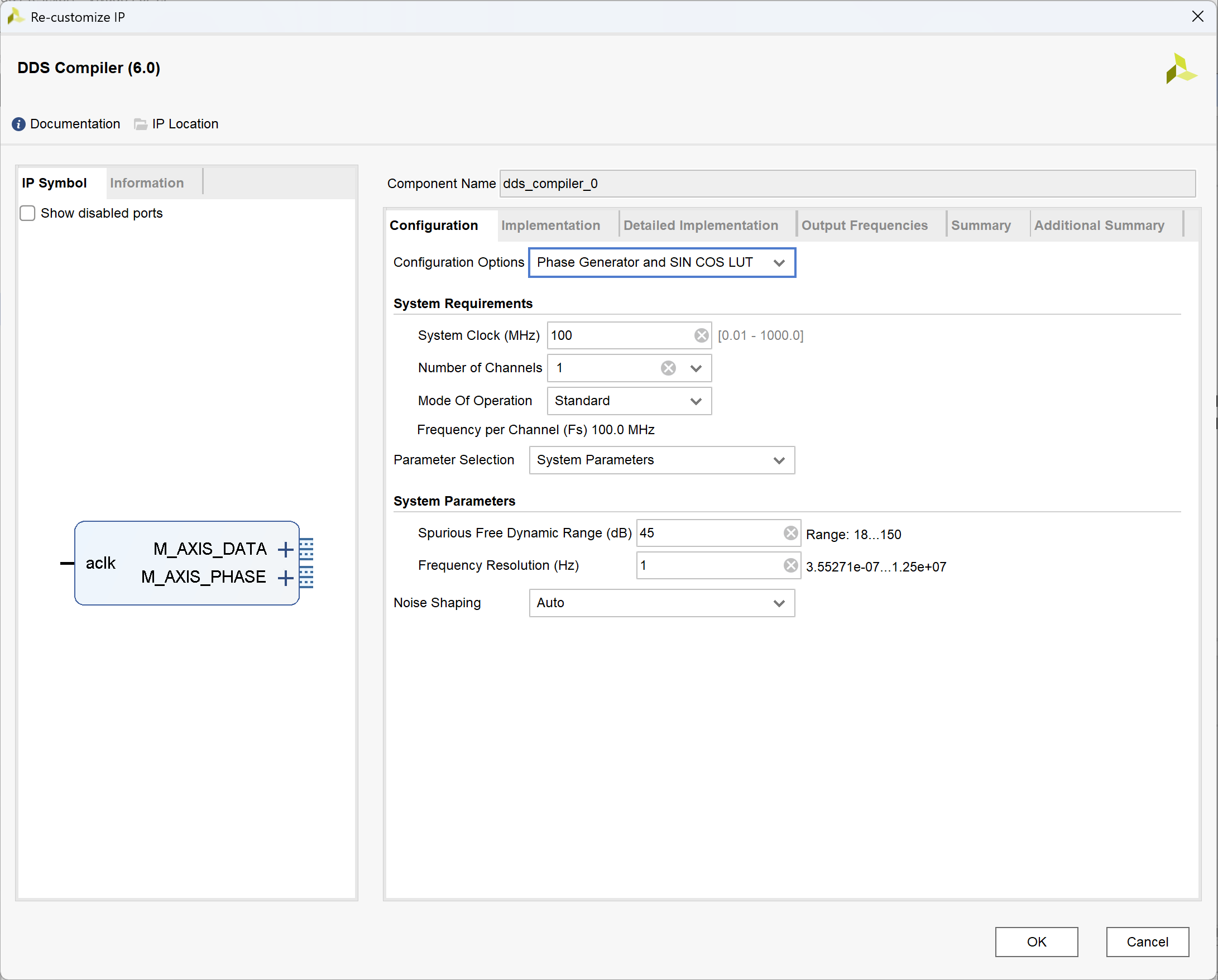
第一页
 第二页第三页默认就行
第二页第三页默认就行
第四页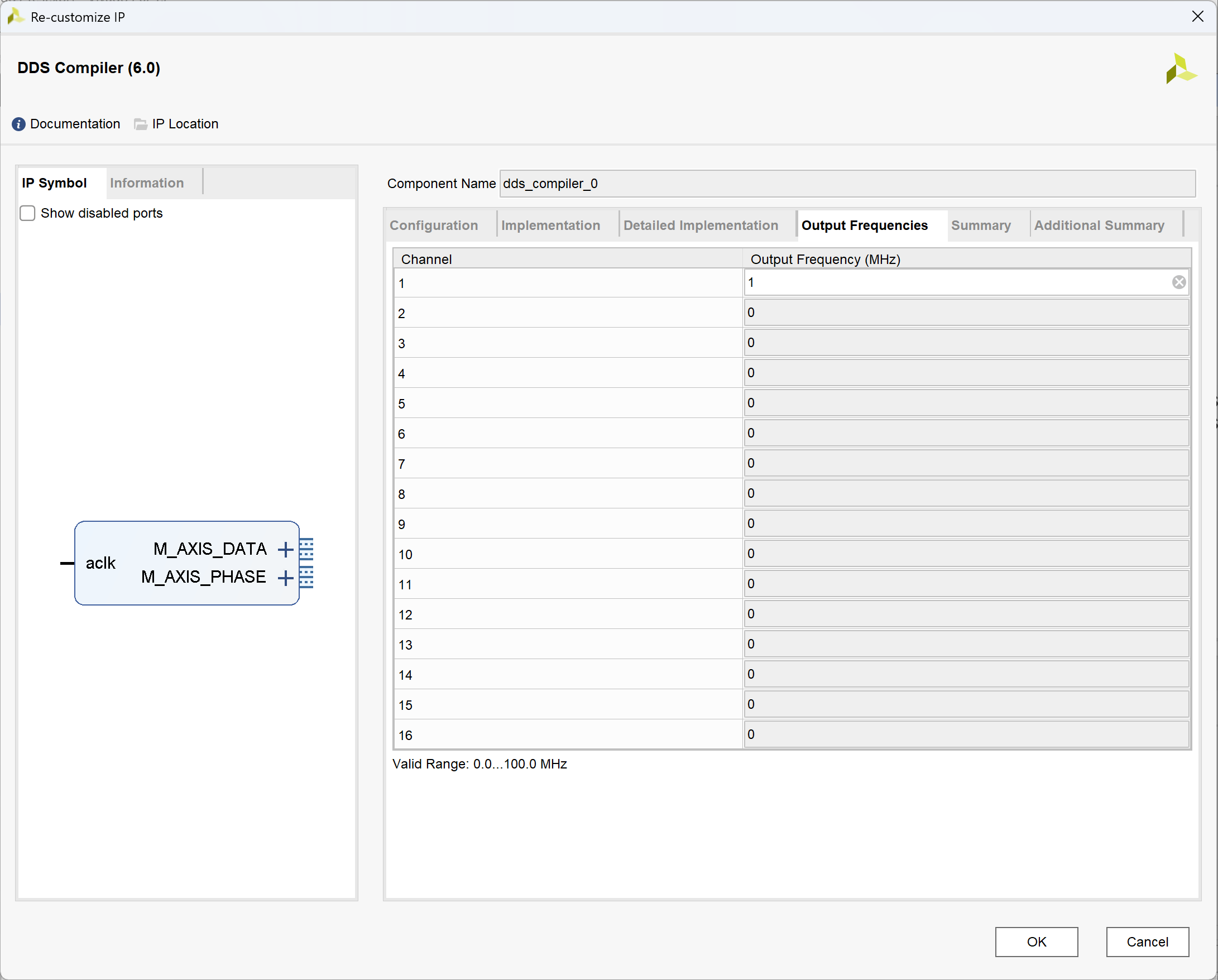 仿真代码如下:
仿真代码如下:
module sys_sim(
);
// 定义信号
reg aclk_0;
wire [7:0] M_AXIS_DATA_0_tdata;
wire M_AXIS_DATA_0_tvalid;
wire [31:0] M_AXIS_PHASE_0_tdata;
wire M_AXIS_PHASE_0_tvalid;
wire [7:0] sin;
wire [7:0]cos;
// 实例化被测模块
design_1_wrapper dut (
.M_AXIS_DATA_0_tdata(M_AXIS_DATA_0_tdata),
.M_AXIS_DATA_0_tvalid(M_AXIS_DATA_0_tvalid),
.M_AXIS_PHASE_0_tdata(M_AXIS_PHASE_0_tdata),
.M_AXIS_PHASE_0_tvalid(M_AXIS_PHASE_0_tvalid),
.aclk_0(aclk_0)
);
// 生成100MHz时钟 (周期=10ns)
initial begin
aclk_0 = 0;
forever #5 aclk_0 = ~aclk_0; // 每5ns翻转一次
end
endmodule生成单一频率的正弦波配置确实很简单,可以直接设置自己想要的频率。
DSS核产生线性调频波
下图为线性调频波的生成效果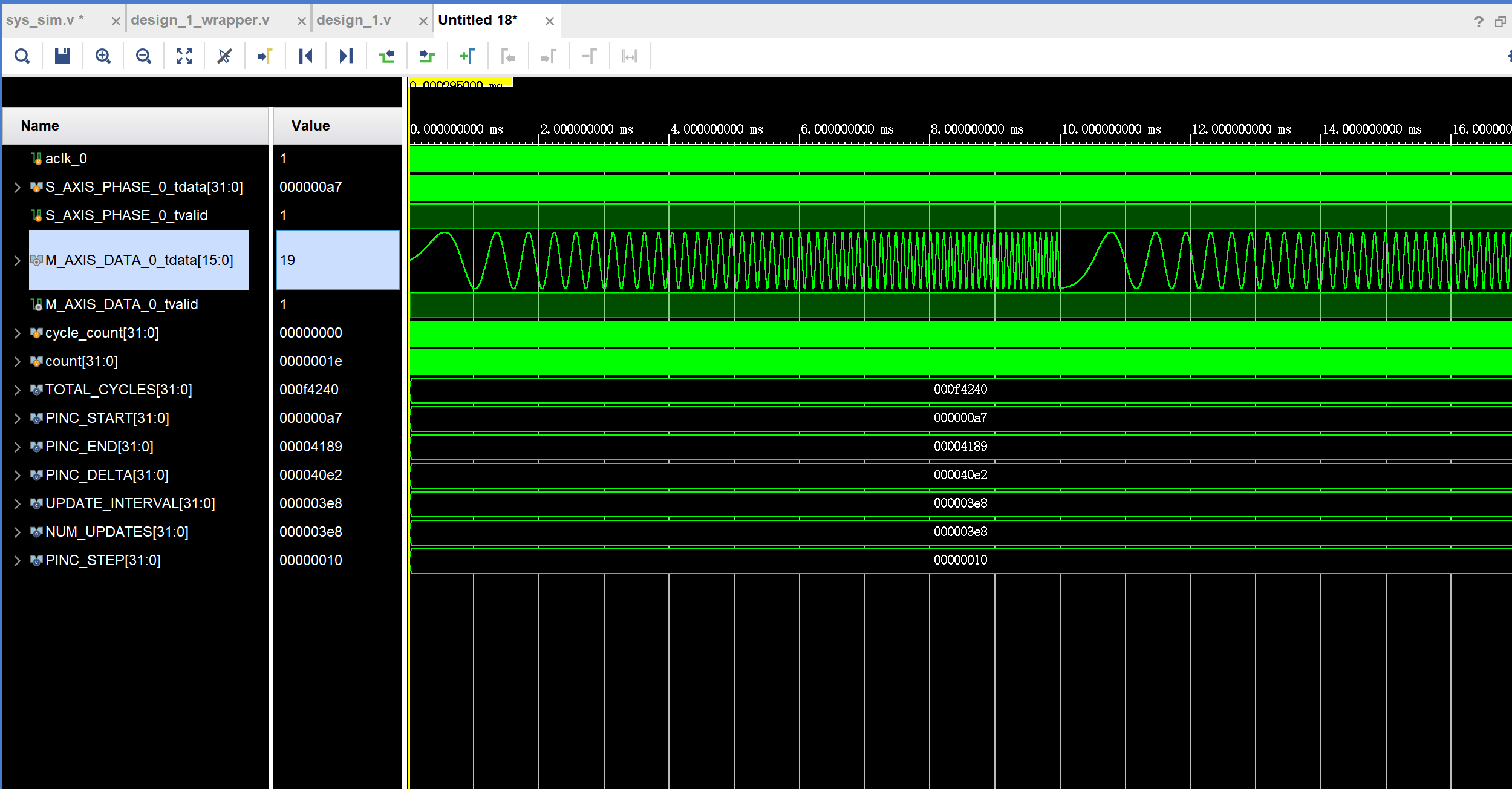
不断的产生100HZ到100Khz的线性调频波,周期为10ms。
要生成这样的波形,IP核要做如下的配置
第一页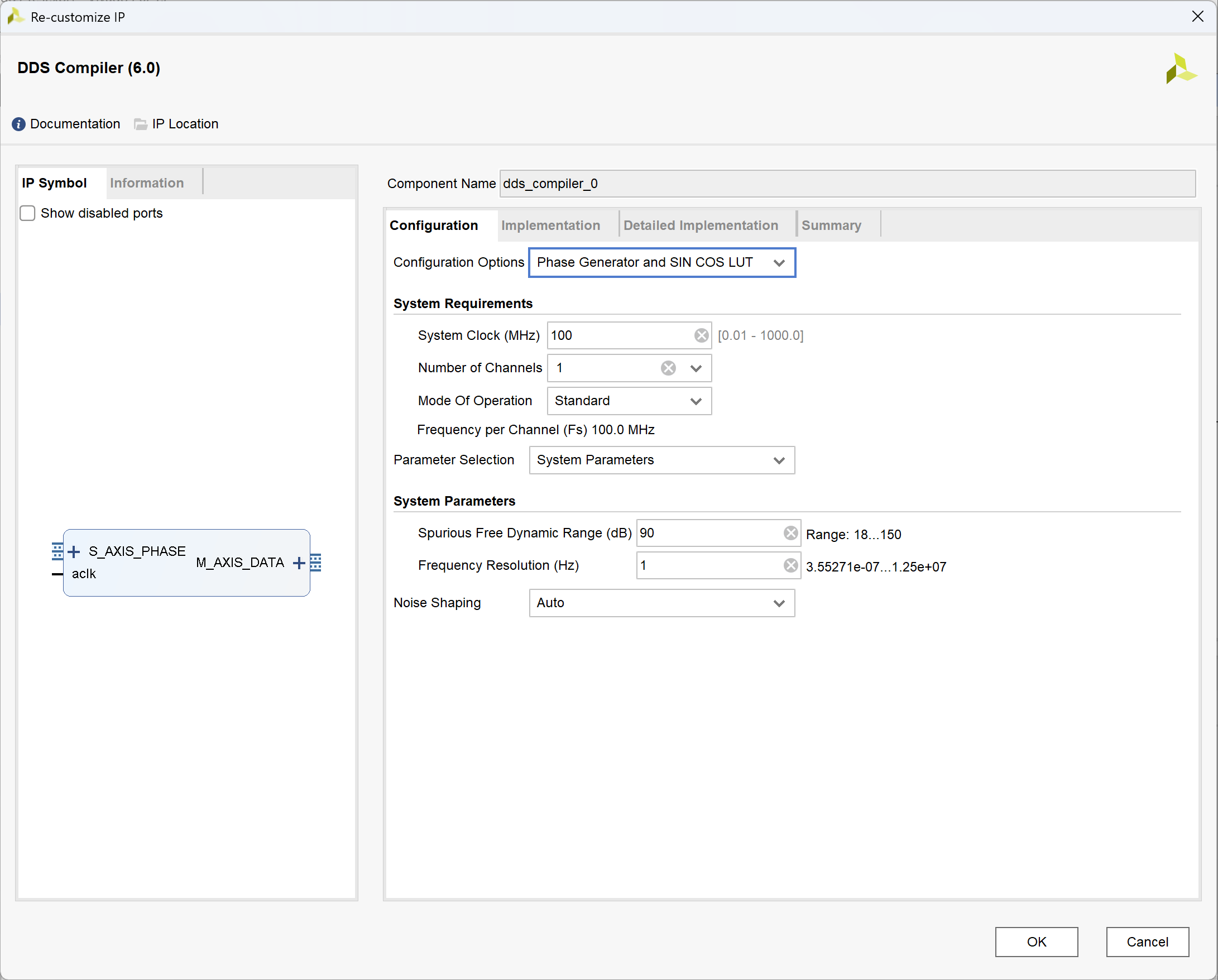
第二页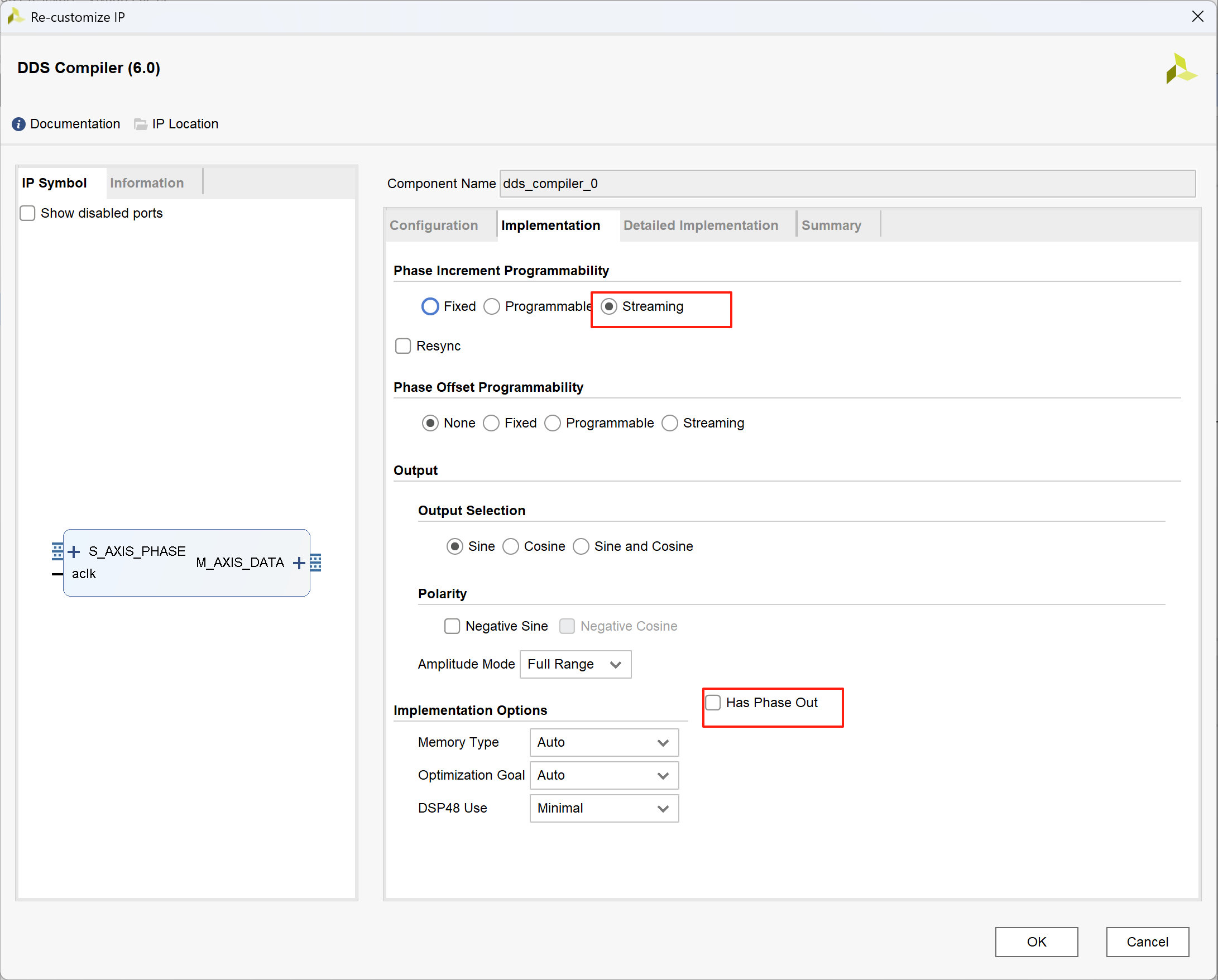
上面的红框是设置IP核可以在运行过程中修改输出的频率,下面的红框是把相位的输出关掉了。
第三页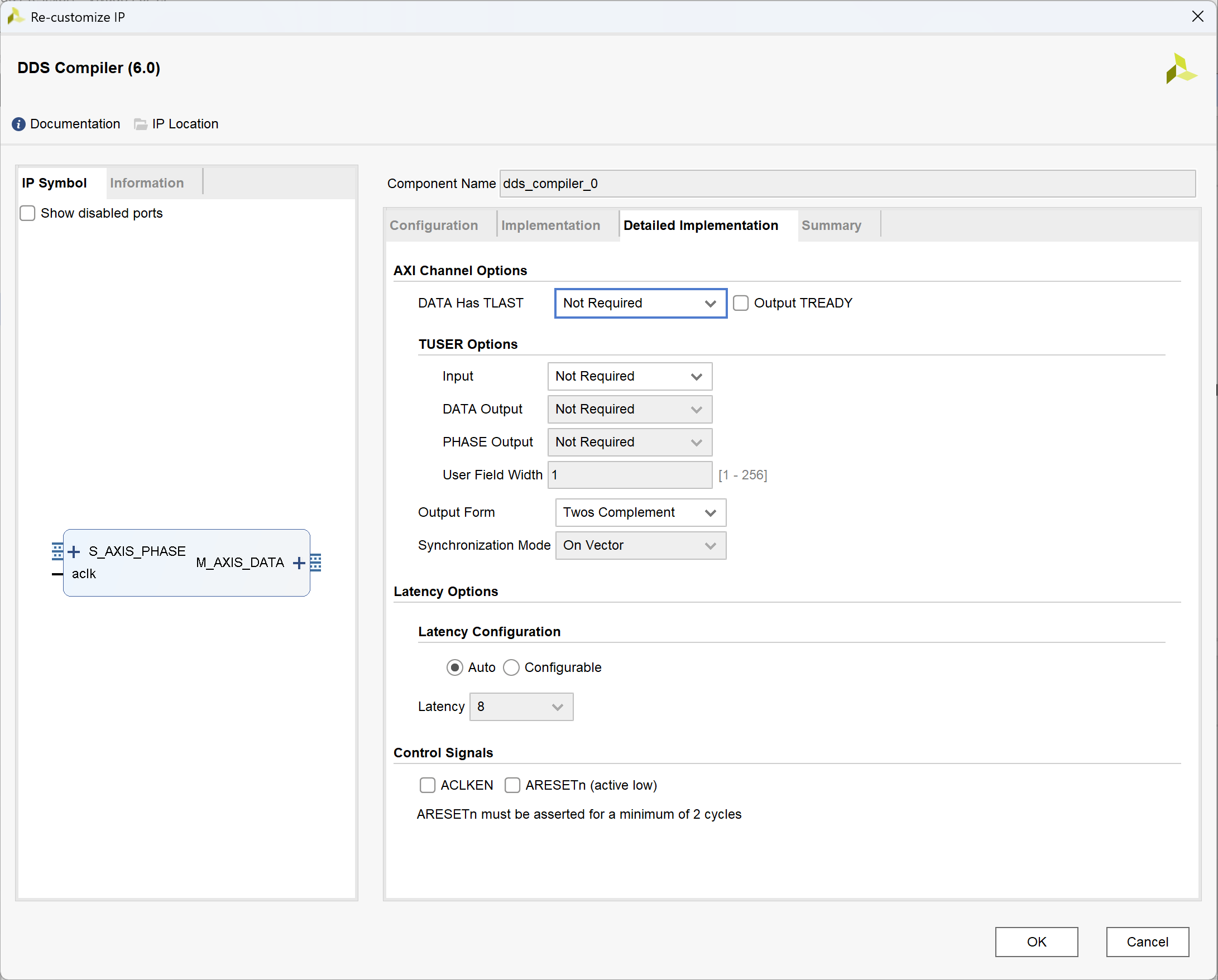
仿真代码如下:
module sys_sim(
);
// 定义信号
reg aclk_0;
reg [31:0] S_AXIS_PHASE_0_tdata;
reg S_AXIS_PHASE_0_tvalid;
wire [15:0] M_AXIS_DATA_0_tdata;
wire M_AXIS_DATA_0_tvalid;
// 实例化被测模块
design_1_wrapper dut (
.M_AXIS_DATA_0_tdata(M_AXIS_DATA_0_tdata),
.M_AXIS_DATA_0_tvalid(M_AXIS_DATA_0_tvalid),
.S_AXIS_PHASE_0_tdata(S_AXIS_PHASE_0_tdata),
.S_AXIS_PHASE_0_tvalid(S_AXIS_PHASE_0_tvalid),
.aclk_0(aclk_0)
);
// 开始生成线性调频波
// 参数计算
parameter TOTAL_CYCLES = 1_000_000; // 10ms @ 100MHz 这个参数设置线性调频波的周期
parameter PINC_START = 167; //这个参数设置起始频率,计算公式为 (START_FREQ * (2**相位累加器宽度)) / 时钟频率;
parameter PINC_END = 16777; //这个参数设置结束频率,计算公式为 (END_FREQ * (2**相位累加器宽度)) / 时钟频率;
parameter PINC_DELTA = PINC_END - PINC_START;
// 每K个周期更新一次PINC
parameter UPDATE_INTERVAL = 1000; // 这个参数设置你频率改变的速度,值越小速度越快
parameter NUM_UPDATES = TOTAL_CYCLES / UPDATE_INTERVAL;
parameter PINC_STEP = PINC_DELTA / NUM_UPDATES;
// 生成100MHz时钟 (周期=10ns)
initial begin
S_AXIS_PHASE_0_tdata <= 167;
S_AXIS_PHASE_0_tvalid<=1;
aclk_0 = 0;
forever #5 aclk_0 = ~aclk_0;
end
// 控制逻辑
reg [31:0] cycle_count=0;
reg [31:0] count=0;
always @(posedge aclk_0) begin
if (cycle_count < NUM_UPDATES)begin
if (count ==UPDATE_INTERVAL) begin
// 更新PINC值
count<=1;
cycle_count <= cycle_count + 1;
S_AXIS_PHASE_0_tdata <= S_AXIS_PHASE_0_tdata + PINC_STEP;
end
else
count<=count+1;
end
else begin
S_AXIS_PHASE_0_tdata <= PINC_START;
cycle_count<=0;
end
end
endmodule写在最后
希望这篇文章可以帮大家快速的使用DDS这个IP核,下篇文章我会根据一些实际的需求教大家怎么改参数,大家有什么问题欢迎留言讨论。如果配置还是有困难也可以私聊我发你工程。