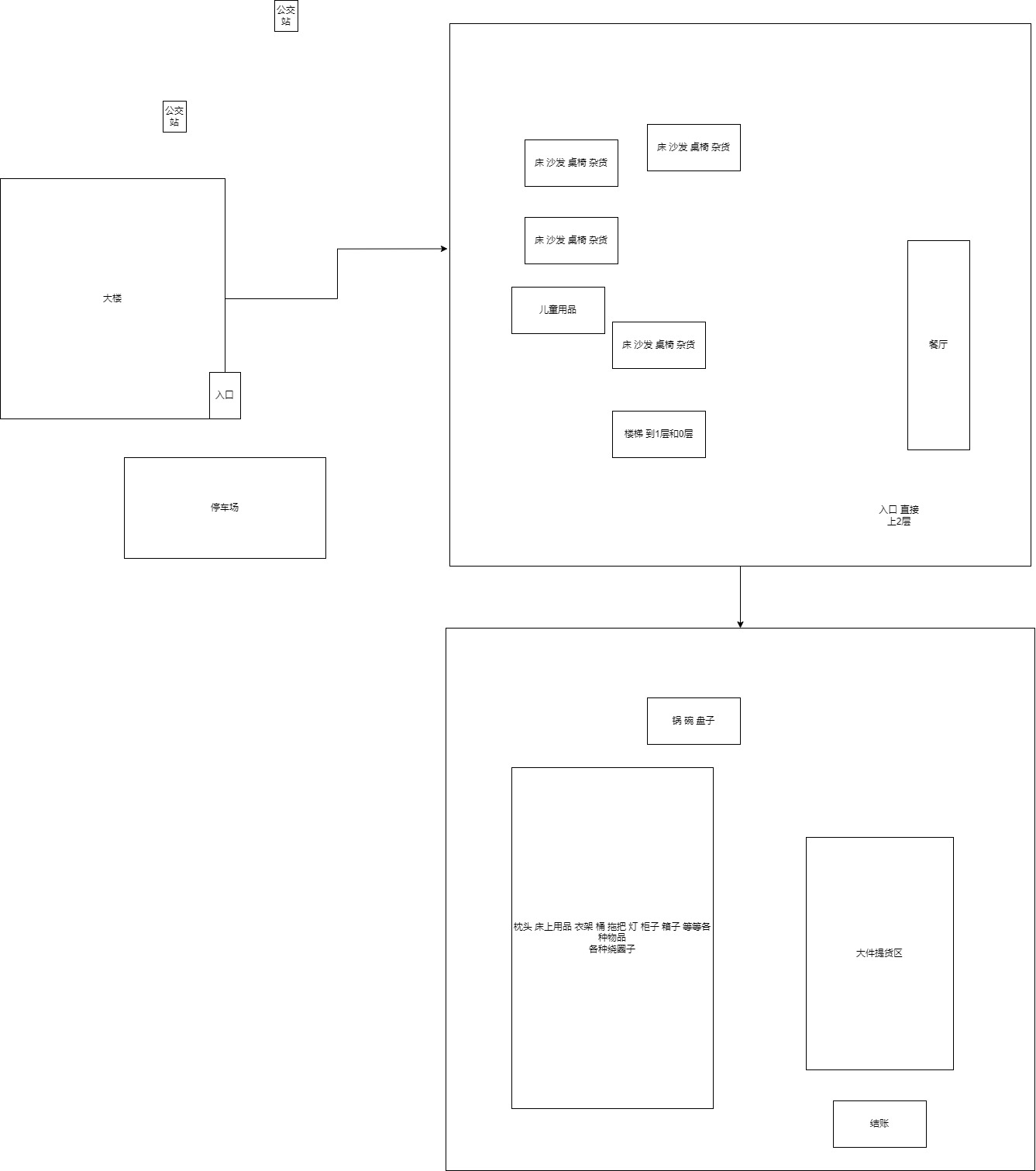
当前位置: 首页 > news >正文 罗马a线 宜家 大致地图 Roma Anagnina news 2026/3/26 19:51:57 查看全文 http://www.jsqmd.com/news/16274/ 相关文章: 中国晶圆厂排行榜:谁是下一个台积电 一首很棒的歌 机器学习优化云虚拟机部署技术解析 tryhackme-预安全-网络基础知识-什么是网络-04 C++ std::function简单笔记 【C++】基于asio的异步https server tryhackme-预安全-网络安全简介-防御性安全简介-02 明天发点东西 嵌入式第六周作业任务二--PWM呼吸灯 2022 ICPC Shenyang tryhackme-预安全-网络安全简介-进攻性安全简介-01 20231326第五周预习报告 复矩阵的奇异值分解(SVD) idea与cursor的整合方案 Codeforces Round 496 (Div. 3) F. Berland and the Shortest Paths Dotnet通过Http2解决CVE-2025-55315高危漏洞 【开源】目前最方便的retroarch模拟器游戏封面获取方式 PWN手的成长之路-18_铁人三项(第五赛区)_2018_rop 日志|JAVAWEB|YApi|vue-cli|VUE-Element 2025.10.18——1黄 幂等的双倍快乐,你值得拥有 10.18总结 10.17总结 软考中级学习总结(2) F - Not Adjacent 2025年粉末冶金制品/零件厂家推荐排行榜,高精度耐磨粉末冶金零件,优质粉末冶金制品公司推荐! Neo4j 图数据库搭建和 Springboot 访问 [buuctf]bjdctf_2020_router AtCoder Beginner Contest 428 ABCDE 题目解析 稻草火把下的星辰:回忆我的90年代求学路