背景:
还是这个机器人示教器项目,上一篇说到使用WasdController实现的拖拽视角,并不是很完美。此篇记录的是:
可以使用鼠标拖拽,实现视角的无限切换,无论物体现在什么姿态,只管任意拖拽鼠标,直到想要的姿态为止。
可以使用鼠标滚轮缩放物体大小。
可以一键重置。
WasdController:
之所以说这种方式不好,是基于我最初的需求而言。如果想拖拽鼠标转换视角,那它就有bug。
因为WasdController的功能,实际是控制目标节点的相对姿态,假设目标节点是个有生命虫子,它原本的姿态是跟屏幕前的你一样,面朝屏幕深处,背朝屏幕(也就是你),上下左右跟屏幕前的你一样。
所以想象一下,如果是个3d游戏,极品飞车那种室外视角,屏幕里那个车的姿态。使用WasdController时,在屏幕上拖拽上下左右,车头就会随动。

(图片源于网络,如有侵权请告知)
再想象如果让WasdController控制相机,用鼠标在屏幕上拖动上下左右时,很像极品飞车的车内视角,或者cs这类第一视角的游戏画面效果。

(图片源于网络,如有侵权请告知)

(图片源于网络,如有侵权请告知)
而且WasdController还可以支持键盘操作。所以实际上如果你用quick做个3d游戏,真的可以。
只是对于我最初的需求而言不太合适。所以就有了下面新的方法。
在这之前还是要强调一句,非常推荐先做demo,把可能的各种数值做成可以在界面调整的,范围大一些。方便调试。想象一下,只旋转镜头(camera)的话,等于自己扭头,很可能看不见目标物体,所以要调整参数,才知道具体什么效果。
MouseArea:
其实最早想到的就是用这个了,只不过刚好看到WasdController,就想着尽量简单去实现,无奈它不能胜任,所以下面看如何用MouseArea实现。
先回顾一下我曾做过的一个简单版的预览调试界面:
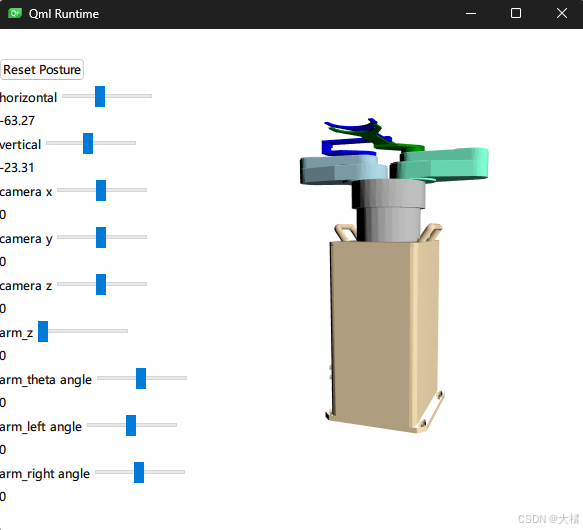
左边滑块按照从上往下说。
1、横向:实际是调整的机器人节点的z轴欧拉旋转,也就是说,无论总体场景的姿态如何,只要左右拖动,机器人即自己左右转。
2、纵向:实际是机器人父级节点的x轴欧拉旋转。
3、camera xyz:很少用,也就一开始用一下看看效果。镜头上下远近动,物体就动(上下左右正好相反)。
4、上条中,本次使用的就是camera的z,控制远近,也就是大小(近大远小)。
5、后面就是机器人关节控制,本次不说了。
最上面的复位:让1、2归零,以及下文实现的机器人相关参数归零。
下面以代码为例说明。
RobotArea.qml:
只取部分节选。
//定义属性,用于外界输入参数property double _dAngleHorizontal: 0property double _dAngleVertical: 0//让外界知道鼠标拖拽的幅度readonly property double _dX_AngleDraged: _ma._dX_AngleDragedreadonly property double _dY_AngleDraged: _ma._dY_AngleDraged//让外界调用,用于重置姿态function f_ResetPosture(){_ma._rX_prev = 0;_ma._rY_prev = 0;_ma._dX_draged = 0;_ma._dY_draged = 0;_ma._dX_AngleDraged = 0;_ma._dY_AngleDraged = 0;}//让外界知道滚轮变化数值,实际对应相机z轴数值,也就是远近property double _dScale: 0//之前的WasdController不用了// WasdController {// controlledObject: scene// xSpeed: -0.1// ySpeed: -0.1// }MouseArea {id: _maanchors.fill: parentproperty real _rX_prev: 0property real _rY_prev: 0property double _dX_draged: 0property double _dY_draged: 0property double _dX_AngleDraged: 0property double _dY_AngleDraged: 0onPressed: {_rX_prev = mouseX;_rY_prev = mouseY;}onPositionChanged: {let dDraged360 = 360 * 8000 / 720;_dX_draged += mouseX - _rX_prev;if (_dX_draged > dDraged360) { _dX_draged = 0; }if (_dX_draged < -dDraged360) { _dX_draged = 0; }_dY_draged += mouseY - _rY_prev;if (_dY_draged > dDraged360) { _dY_draged = 0; }if (_dY_draged < -dDraged360) { _dY_draged = 0; }_dX_AngleDraged = _dX_draged * 720 / 8000;_dY_AngleDraged = _dY_draged * 720 / 8000;}onWheel: (wheel) => {if (wheel.angleDelta.y > 0){root._dScale++;if (root._dScale > 20) { root._dScale = 20; }}if (wheel.angleDelta.y < 0){root._dScale--;if (root._dScale < -20) { root._dScale = -20; }}}}我认为代码应该见名知意了。我把MouseArea放在RobotArea里面,算是封装,外界调用时更简洁。逻辑上划分清楚。
数据类型:real和double通用就得了,没影响。
drag值:大于360或小于-360时让它归零,就实现无限翻转了。
滚轮wheel值:往前滚动是120,往后是-120,这个qt设计的不好,计数还得自己搞。这个数对应外界camera的z轴值,我的项目具体情况是,z轴取值正负20,同样要自己试过才知道多大值合适。
main_simple.qml:
最外层的界面。将来集成到项目时,也是参考此界面的代码,可以把RobotArea当做组件用。
RowLayout {anchors.fill: parentColumnLayout {Layout.fillHeight: true//复位按钮Button {text: "Reset Posture"onClicked: {sldr_horizontal.value = 0;sldr_vertical.value = 0;_robot.f_ResetPosture();_robot._dScale = 0;}}//横向姿态RowLayout {Label { text: "horizontal" }Slider {id:sldr_horizontalfrom: -360to: 360value: 0}}Label { text: sldr_horizontal.value }//纵向姿态RowLayout {Label { text: "vertical" }Slider {id:sldr_verticalfrom: -360to: 360value: 0}}Label { text: sldr_vertical.value }...//远近、大小RowLayout {Label { text: "camera z" }Slider {id:sldr_cmr_zfrom: -20to: 20value: 0}}Label { text: sldr_cmr_z.value }...}RobotArea {id: _robotLayout.fillHeight: trueLayout.fillWidth: true//横纵姿态_dAngleHorizontal: sldr_horizontal.value_dAngleVertical: sldr_vertical.value//远近大小_dCameraZ: sldr_cmr_z.value...//拖拽、滚轮on_DX_AngleDragedChanged: sldr_horizontal.value = _dX_AngleDragedon_DY_AngleDragedChanged: sldr_vertical.value = _dY_AngleDragedon_DScaleChanged: sldr_cmr_z.value = -_dScale}}以上种种,有些貌似能用属性绑定很简洁,但不行,有些会发生循环绑定。如果用过TabBar和SwipeView组合,一定知道官方代码有
onCurrentIndexChanged: tabBar.setCurrentIndex(currentIndex)
setCurrentIndex函数就是设置当前索引,但不触发indexChanged信号,很显然就是有些绑定不能让它陷入死循环,要手动控制。这就是这类函数的意义。
效果:
完成上述这些,就可以愉快玩耍了。
左右拖拽:机器人左右转。
上下拖拽:机器人前后翻跟头。
滚轮上下:远缩小,近放大。
任意时候任意角度,可以随便看细节了。
如果不爽,点一下姿态重置按钮,一切从头开始。
本文完。