实用指南:kalibr进行相机内参以及相机imu的融合标定
1、采集标定数据
参考该视频教程:
https://www.youtube.com/watch?app=desktop&v=puNXsnrYWTY
2、转rosbag包
首先安装好Docker
在linux下运行如下命令,获取 VideoIMUCapture-Android 的github库
git clone https://github.com/DavidGillsjo/VideoIMUCapture-Android.git进入对应文件夹
cd VideoIMUCapture-Android/calibration需要以root权限进入容器,那么需要输入类似命令,换为自己的路径
SUDO=1 DUSER=root DATA=/home/ljy18/VideoIMUCapture-Android/dataset ./run_dockerhub.sh容器是退出后删除,文件夹挂在到容器内后对应的目录为/data
需要转为euroc格式的数据集bag包,原始文件夹格式需要为
dataset_name/
├── mav0/
│ ├── cam0/
│ │ ├── data/
│ │ │ ├── 1403....png
│ │ │ └── ...
│ │ ├── data.csv
│ ├── imu0/
│ │ ├── data.csv
其中:
mav0/cam0/data.csv的格式为
#timestamp [ns],filename
1403636579763555584,1403636579763555584.png
1403636579863555584,1403636579863555584.png
...
mav0/imu0/data.csv的格式为
#timestamp [ns],w_RS_S_x [rad s^-1],w_RS_S_y [rad s^-1],w_RS_S_z [rad s^-1],
a_RS_S_x [m s^-2],a_RS_S_y [m s^-2],a_RS_S_z [m s^-2]
1403636579763555584,-0.0015,0.0023,0.0009,9.8085,-0.0321,0.0230
...
Imu频率要远大于图片帧频率
用当前目录下的kalibr_bagcreater.py(见附录)去替换掉原本针对旧数据集格式的kalibr_bagcreater:
cp /data/kalibr_bagcreater.py /kalibr_workspace/src/Kalibr/aslam_offline_calibration/kalibr/python/kalibr_bagcreater转为bag包
kalibr_bagcreater \
--folder /data/VideoTV00001_EuRoC \
--output-bag /data/VideoTV00001_calibration/VideoTV00001_euroc.bag查看话题名称是否正确
rosbag info /data/VideoTV00001_calibration/VideoTV00001_euroc.bag出现类似如下内容即格式正确
types: sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743]
sensor_msgs/Imu [6a62c6daae103f4ff57a132d6f95cec2]
topics: /cam0/image_raw 2154 msgs : sensor_msgs/Image
/imu0 13542 msgs : sensor_msgs/Imu3、相机内参标定
进入标定文件夹
cd /data/VideoTV00001_calibration在该目录下新建一个target.yaml文件,这个是所用标定板的配置文件,参考标定板如图:
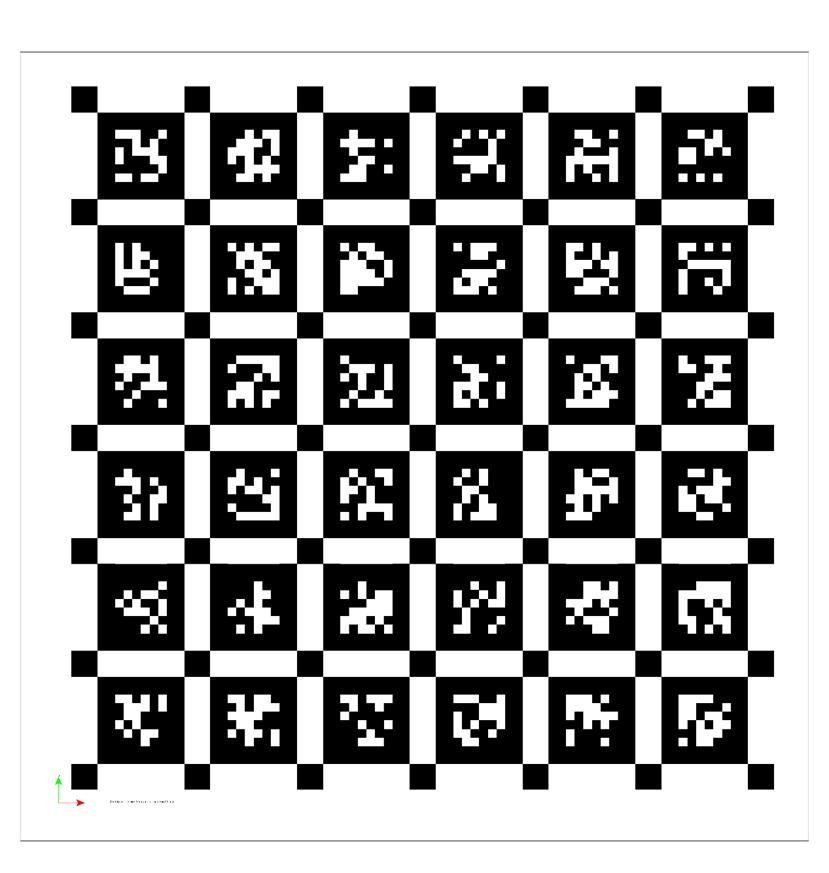
target.yaml文件内容为
tagCols: 6
tagRows: 6
tagSize: 0.021
tagSpacing: 0.3
target_type: aprilgrid其中tagSize是打印后每个格子的实际尺寸,单位是米。需要根据实际调整。
进行相机内参标定
kalibr_calibrate_cameras --bag VideoTV00001_euroc.bag --target target.yaml --models pinhole-radtan --topics /cam0/image_raw标定完成后会弹出可视化结果并输出标定结果文件至该目录下
4、相机imu外参标定
需要再新建imu.yaml和camchain.yaml文件
imu.yaml是imu内参的配置文件,可在产品手册中获取或者获取一小时以上imu的静置数据进行imu内参标定。Imu.yaml的格式如下:
accelerometer_noise_density: 0.00061667
accelerometer_random_walk: 0.0000043333
gyroscope_noise_density: 0.000098902
gyroscope_random_walk: 0.0000012928
rostopic: /imu0
update_rate: 188.58097757972单位为
gyroscope_noise_density | 角速度白噪声 | rad/s/√Hz |
accelerometer_noise_density | 加速度白噪声 | m/s²/√Hz |
gyroscope_random_walk | 陀螺仪偏置随机游走 | rad/s²/√Hz |
accelerometer_random_walk | 加速度计偏置随机游走 | m/s³/√Hz |
update_rate根据实际频率填写
camchain.yaml是相机内参的配置文件,根据刚才相机内参的标定结果填写,camchain.yaml的内容格式如下:
cam0:
cam_overlaps: []
camera_model: pinhole
distortion_coeffs: [0.07936144147573729, -0.09439727502429124, -0.001944215543450636,
-0.0013778851088523114]
distortion_model: radtan
intrinsics: [643.3140528909328, 642.1840798849714, 986.8635102770212, 495.85841930165645]
resolution: [1920, 1080]
rostopic: /cam0/image_raw进行外参标定
kalibr_calibrate_imu_camera --target target.yaml --imu imu.yaml --cams camchain.yaml --bag VideoTV00001_euroc.bag标定完成后会弹出可视化结果并输出标定结果文件至该目录下
附录:新的kalibr_bagcreater.py内容如下,可以放在/data/目录下:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# Compatible with EuRoC dataset format
# Structure:
# dataset_name/
# ├── mav0/
# │ ├── cam0/
# │ │ ├── data/
# │ │ │ ├── 1403....png
# │ │ │ └── ...
# │ │ ├── data.csv
# │ ├── imu0/
# │ │ ├── data.csv
#
# Output topics:
# /cam0/image_raw
# /imu0
print("importing libraries...")
import rosbag
import rospy
from sensor_msgs.msg import Image
from sensor_msgs.msg import Imu
import ImageFile
import time, sys, os
import argparse
import cv2
import numpy as np
import csv
parser = argparse.ArgumentParser(description='Create a ROS bag using EuRoC dataset (images + IMU).')
parser.add_argument('--folder', metavar='folder', required=True, help='Root folder of dataset (contains mav0)')
parser.add_argument('--output-bag', metavar='output_bag', default="output.bag", help='ROS bag output path')
parsed = parser.parse_args()
# === Helper functions ===
def read_image_list(cam_dir):
"""Read image timestamps and filenames from camX/data.csv"""
csv_path = os.path.join(cam_dir, "data.csv")
data_dir = os.path.join(cam_dir, "data")
images = []
timestamps = []
if not os.path.exists(csv_path):
print(" Image CSV not found:", csv_path)
return []
with open(csv_path, 'r') as f:
reader = csv.reader(f)
header = next(reader, None)
for row in reader:
if len(row) < 2:
continue
ts, filename = row[0], row[1]
full_path = os.path.join(data_dir, filename)
if os.path.exists(full_path):
images.append((ts, full_path))
else:
print(" Missing image file:", full_path)
# sort by timestamp
images.sort(key=lambda x: int(x[0]))
return images
def read_imu_data(imu_dir):
"""Read IMU measurements from imu0/data.csv"""
imu_csv = os.path.join(imu_dir, "data.csv")
if not os.path.exists(imu_csv):
print(" IMU CSV not found:", imu_csv)
return []
imu_data = []
with open(imu_csv, 'r') as f:
reader = csv.reader(f)
header = next(reader, None)
for row in reader:
if len(row) < 7:
continue
timestamp = row[0]
gyro = [float(x) for x in row[1:4]]
accel = [float(x) for x in row[4:7]]
imu_data.append((timestamp, gyro, accel))
return imu_data
def load_image_to_rosmsg(filename, timestamp_str):
"""Convert image to ROS Image message with timestamp"""
image_np = cv2.imread(filename, cv2.IMREAD_GRAYSCALE)
if image_np is None:
print(" Failed to load:", filename)
return None, None
secs = int(timestamp_str[0:-9])
nsecs = int(timestamp_str[-9:])
timestamp = rospy.Time(secs, nsecs)
rosimg = Image()
rosimg.header.stamp = timestamp
rosimg.height = image_np.shape[0]
rosimg.width = image_np.shape[1]
rosimg.encoding = "mono8"
rosimg.step = rosimg.width
rosimg.data = image_np.tostring()
return rosimg, timestamp
def create_imu_msg(timestamp_str, gyro, accel):
"""Convert IMU sample to ROS Imu message"""
secs = int(timestamp_str[0:-9])
nsecs = int(timestamp_str[-9:])
timestamp = rospy.Time(secs, nsecs)
msg = Imu()
msg.header.stamp = timestamp
msg.angular_velocity.x = gyro[0]
msg.angular_velocity.y = gyro[1]
msg.angular_velocity.z = gyro[2]
msg.linear_acceleration.x = accel[0]
msg.linear_acceleration.y = accel[1]
msg.linear_acceleration.z = accel[2]
return msg, timestamp
# === Main logic ===
try:
bag = rosbag.Bag(parsed.output_bag, 'w')
print(" Creating bag:", parsed.output_bag)
# Camera
cam0_dir = os.path.join(parsed.folder, "mav0", "cam0")
image_list = read_image_list(cam0_dir)
print(" Found {} images".format(len(image_list)))
for ts, filename in image_list:
rosimg, t = load_image_to_rosmsg(filename, ts)
if rosimg is not None:
bag.write("/cam0/image_raw", rosimg, t)
# IMU
imu0_dir = os.path.join(parsed.folder, "mav0", "imu0")
imu_list = read_imu_data(imu0_dir)
print(" Found {} imu samples".format(len(imu_list)))
for ts, gyro, accel in imu_list:
imumsg, t = create_imu_msg(ts, gyro, accel)
bag.write("/imu0", imumsg, t)
print(" Finished writing bag file.")
finally:
bag.close()
print(" Bag closed successfully.")