工业相机是专门为工业应用设计的图像采集设备,具有高精度、高速度、高稳定性和环境适应性强的特点。其核心作用是通过图像处理和分析,为工业自动化提供关键数据支持。工业3D相机industrial 3D camera作为工业相机的一种,适用于自动检测与测量、过程控制和机器人引导等工业应用场景的三维相机。三维相机即三维成像系统 3D imaging system ,是一种用来获得物体或场景三维信息(如三维点云)的非接触式光学成像装置。下面我们来看看工业3D相机的分类。

一、分类
1、深度相机 depth camera 一种能够获得用于三维重构的物体深度信息的相机。
2、 点成像三维相机 3D point-scan camera,单次采样输出数据为单点数据的三维相机。
3、线成像三维相机 3D line-scan camera,单次采样输出数据为线阵数据的三维相机。
4、面成像三维相机 3D area-scan camera,单次采样输出数据为面阵数据的三维相机。
5、线激光三维相机 3D laser camera / laser triangle sensor 一种通过单个或多个图像传感器捕获激光发生器投射在物体表面的激光线信息,基于三角测量原理重构物体表面轮廓信息的三维相机。
6、结构光三维相机 3D structured light camera,一种通过单个或多个图像传感器捕获光源投射到被测物体表面的结构光信息,基于三角测量原理重构物体表面形貌信息的三维相机。
7、光场相机 light field camera 一种由光学镜头、微透镜阵列和图像传感器组成的用于记录空间中光场信息并解析得到物体三维信息的相机。
8、飞行时间相机 time-of-flight(ToF) camera,给目标物连续发送光脉冲并用传感器接收从物体返回的光,通过探测光脉冲的飞行往返时间来得到目标物距离的一种三维相机。pixel
9、双目立体相机 binocular stereo camera,依靠两个图像传感器从两个视角拍摄图像(彩色RGB或者灰度图),通过视差计算得到目标物深度信息的一种三维相机。
10、多目立体相机 multiocular stereo camera,依靠多个图像传感器从不同视角拍摄图像(彩色RGB或者灰度图),通过视差计算得到目标物深度信息的一种三维相机。
二、常见参数
1、像素pixel,二维图像中的最小单一离散元素。
2、点 point,可以在三维空间中被坐标和其他属性表述的单一元素。
3、飞点 outliers,由于噪音、反光等原因导致的三维连续图像表面突然出现的异常离群点。
4、噪点 noise,三维相机输出图像中的粗糙部分或者图像信息(灰度、亮度等)的随机变化。
5、点云 point cloud,三维空间离散点的数据集合。
6、深度图 depth map,对目标物表面进行X和Y方向的采样,将Z方向信息通过灰度或色彩而形成的图像。
7、采样点距 sampling dot pitch,相邻采样点之间在X/Y方向上的距离(单位:mm)。
8、均匀采样 uniform sampling,使用相同的步长,在某一方向上进行数据采样的方法。
9、采样密度 sampling density,单位长度或面积上采样点的个数。
10、强度图 intensity image,通过三维相机采集的能够反映工件表面反光能力的图像。
三、性能参数
1、视场 field of view(FOV) 在一定物距上,系统可获取物体或场景的三维数据和点云的范围尺寸。注:视场通常由长(mm)宽(mm)表示,也可用相机的视角范围表示。
2 、深度测量范围 depth of field / measurement range 相机在Z轴方向上可以保证三维成像精度的深度范围。 注:三维相机深度测量范围,如图1所示。
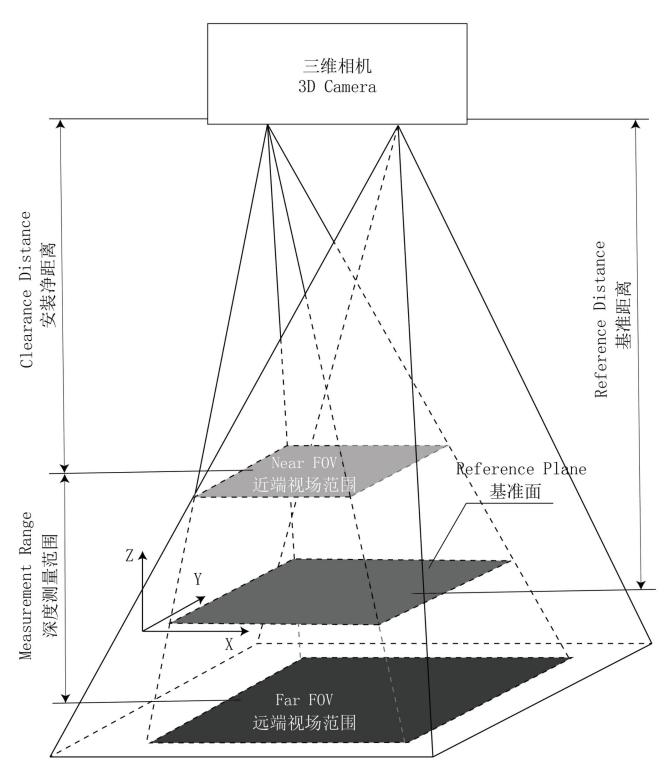
3、 安装净距离 clearance distance 相机前端面与近端视野范围的最短垂直距离。 注:三维相机安装净距离,如图1所示。
4 、基准距离 reference distance 相机前端面与基准面的最短垂直距离。 注:三维相机基准距离,如图1所示。
5、 T/CMVU 001—2022 7测量体积 measurement volume 在保证精度的前提下,相机可扫描获取物体或场景的三维数据点云的体积范围。注:测量体积通常由长(mm)宽(mm)高(mm)表示。
6、 图像分辨率 image resolution 三维相机能捕捉到的二维图像的像素数。 注:图像分辨率=像素列数(宽)像素行数(高)。
7 、XY轴分辨率 XY-axes resolution 三维相机在XY坐标轴方向上所能分辨的真实物理尺度(单位:mm)。
8、Z轴分辨率/深度分辨率 Z-axis resolution 三维相机在Z坐标轴方向上所能分辨的真实物理尺度(单位:mm)。9、Z轴绝对精度 Z-axis accuracy Z轴准确度 描述三维相机的测量精度,相机测得的Z轴方向高度差与真值的偏差。
10、Z轴重复精度 Z-axis repeatability 在相机和被测物处于静止状态下,一定次数的重复测量得到的Z值分布标准差的三倍(3σ)。
11、Z轴线性度 Z-axis linearity 三维相机在Z轴测量范围内的测量值与其拟合直线间的最大偏差占全量程输出的百分比。注:使用% of MR或者%F.S.表示。
12、最大深宽比 depth-to-width ratio(DWR) 可测物体表面凹陷区域最大深度与某一方向上开口宽度比。
13、轮廓点数 profile points 线阵三维相机采集轮廓上的数据点数量。
14、点率 point rate 在指定工作条件下,工业三维相机每秒可输出的三维数据点数量(单位:点/秒)。注:点率(面阵)=帧率像素分辨率;点率(线阵)=行率轮廓点数。 T/CMVU 001—2022 8
15、行率 line rate 在指定工作条件下,工业三维相机每秒可完成线扫描并输出对应三维图像的行数(单位:行/秒)。注:适用于通过扫描方式获取数据的工业三维相机。
16、帧率 frame rate 在指定工作条件下,工业三维相机每秒可输出的三维图像张数(单位:帧/秒)。