光束平差法(Bundle Adjustment, BA)是计算机视觉和 SLAM 领域的核心优化算法,本质是一种带约束的非线性最小二乘优化,目标是通过最小化「3D 点投影到 2D 图像的重投影误差」,来求解最优的相机位姿和3D 路标点坐标。
一、核心定义拆解
“光束” 的含义可以将相机光心到 3D 路标点的连线看作一束 “光线”。每一个 3D 点会在不同图像中形成多条这样的光线,这些光线理论上应该交汇于同一个 3D 点。
但由于图像噪声、特征匹配误差、相机模型误差等因素,实际光线不会严格交汇 ——BA 的作用就是调整相机位姿和3D 点坐标,让这些光线尽可能交汇,从而消除误差。
“平差” 的含义指 “平差误差”,即通过优化手段,让所有观测数据的误差达到全局最小,而非局部最小。
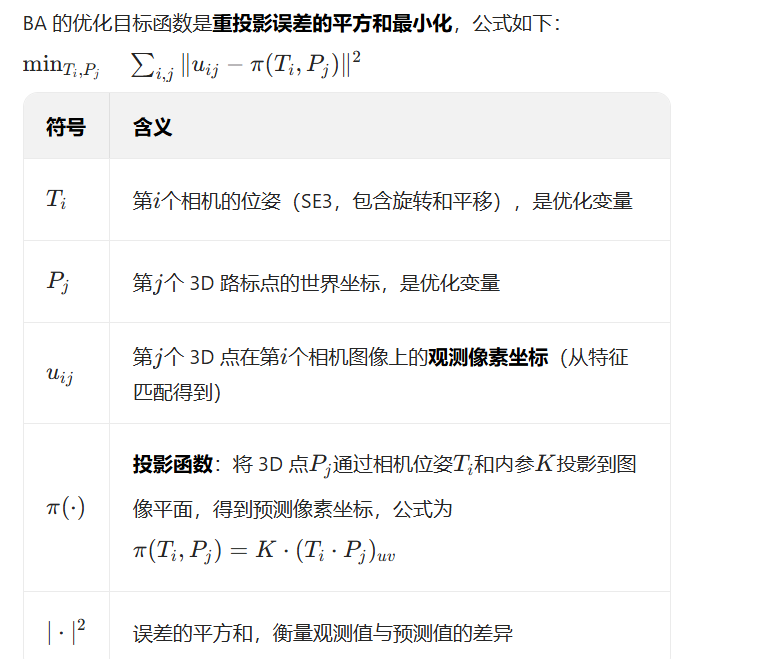
数学本质BA 的优化目标函数是重投影误差的平方和最小化
BA 与 SLAM 的关系
BA 是 SLAM 后端优化的核心
SLAM 前端负责提取特征、匹配、估计相机的初始位姿;后端则通过 BA 优化,消除前端的累积误差,得到全局一致的位姿和地图。
与其他算法的区别
PnP:只优化相机位姿,3D 点坐标固定;
ICP:只优化相机位姿,基于点云匹配;
BA:同时优化相机位姿和3D 点坐标,是更通用、精度更高的优化方法。