4.1 自由振动 固有频率与固有振型
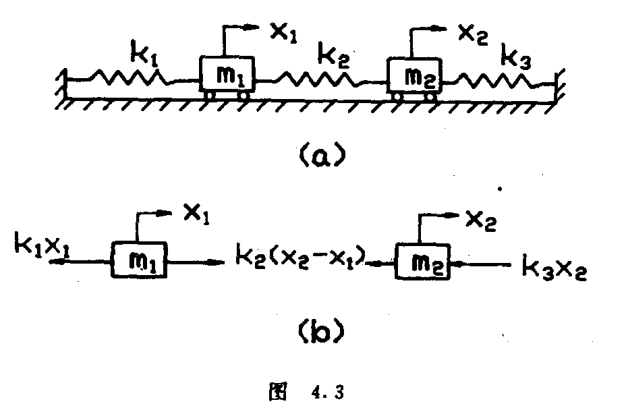
如图 4.3(a)所示为无阻尼两自由度系统。
![image-20260620013402061]()
以静平衡位置为坐标原点,设质量\(m_1、m_2\)的坐标为\(x_1、x_2\),并假设位移\(x_1\)与\(x_2\)足够小,保证系统在线性范围内运动。对质量\(m_1\)和\(m_2\)应用牛顿第二定律,根据图 4.3(b)得
\[\begin{cases}
m_1 \ddot{x}_1 + (k_1 + k_2)x_1 - k_2 x_2 = 0 \\
m_2 \ddot{x}_2 - k_2 x_1 + (k_2 + k_3)x_2 = 0
\end{cases} \tag{4.1}
\]
方程(4.1)为系统的自由振动微分方程。
令
\[\begin{cases}
k_1 + k_2 = k_{11},\quad k_2 + k_3 = k_{22} \\
-k_2 = k_{12}
\end{cases} \tag{4.2}
\]
则方程(4.1)改写为
\[\begin{cases}
m_1 \ddot{x}_1 + k_{11} x_1 + k_{12} x_2 = 0 \\
m_2 \ddot{x}_2 + k_{12} x_1 + k_{22} x_2 = 0
\end{cases} \tag{4.3}
\]
方程(4.3)为二阶常系数线性齐次微分方程组。
因为方程(4.3)是齐次的,所以\(x_1(t)、x_2(t)\)是解,则与其相差一个常数因子\(\alpha x_1(t),\alpha x_2(t)\)也是解。
我们感兴趣同步运动解,即\(x_1(t)、x_2(t)\)对时间有相同的依赖关系,或者说\(x_2/x_1\)与时间无关,用\(f(t)\)表示\(x_1(t)\)和\(x_2(t)\)对时间的依赖部分,则
\[x_1(t)=u_1 f(t),\quad x_2(t)=u_2 f(t) \tag{4.4}
\]
式(4.4)中\(u_1、u_2\)为待定常数。将式(4.4)代入方程(4.3)得
\[\begin{cases}
m_1 u_1 \ddot{f}(t) + \left(k_{11} u_1 + k_{12} u_2\right) f(t) = 0 \\
m_2 u_2 \ddot{f}(t) + \left(k_{12} u_1 + k_{22} u_2\right) f(t) = 0
\end{cases} \tag{4.5}
\]
由方程(4.5)得
\[-\frac{\ddot{f}(t)}{f(t)} = \frac{k_{11} u_1 + k_{12} u_2}{m_1 u_1} = \frac{k_{12} u_1 + k_{22} u_2}{m_2 u_2} = \lambda \tag{4.6}
\]
由于\(m_1、m_2、k_{11}、k_{12}、k_{22}、u_1\)和\(u_2\)全部是实常数,所以\(\lambda\)必为实常数。又由方程式(4.6)得
\[\ddot{f}(t) + \lambda f(t) = 0 \tag{4.7}
\]
为使方程(4.7)有一振动解,\(\lambda\)必须为正实数,令\(\lambda=\omega^2\)。则设解为
\[f(t)=C\cos(\omega t - \varphi) \tag{4.8}
\]
式中\(C\)为常数,\(\omega\)为简谐振动的频率,\(\omega=\sqrt{\lambda}\),\(\varphi\)为初相位角。由初始条件决定常数\(C、\varphi\)。
另一方面,由方程(4.6)的右边得
\[\begin{cases}
\left(k_{11} - \omega^2 m_1\right)u_1 + k_{12} u_2 = 0 \\
k_{12} u_1 + \left(k_{22} - \omega^2 m_2\right)u_2 = 0
\end{cases} \tag{4.9}
\]
方程(4.9)表示以\(u_1、u_2\)为未知数的齐次代数方程组。其中\(\omega^2\)起参数作用。方程(4.9)具有非零解的条件为\(u_1、u_2\)的系数行列式等于零,即
\[\Delta(\omega^2) = \det\begin{pmatrix}
k_{11}-\omega^2 m_1 & k_{12} \\
k_{12} & k_{22}-\omega^2 m_2
\end{pmatrix}=0 \tag{4.10}
\]
式\(\Delta(\omega^2)\)称为特征行列式,展开后得到\(\omega^2\)的二次多项式。展开(4.10)式得
\[\Delta(\omega^2)=m_1 m_2 \omega^4 - \left(m_1 k_{22} + m_2 k_{11}\right)\omega^2 + k_{11}k_{22}-k_{12}^2 = 0 \tag{4.11}
\]
方程(4.11)称为特征方程或频率方程。其根为
\[\omega^2_{1,2} = \frac{1}{2}\frac{m_1 k_{22} + m_2 k_{11}}{m_1 m_2}
\mp \sqrt{\left(\frac{m_1 k_{22} + m_2 k_{11}}{2m_1 m_2}\right)^2 - \frac{k_{11}k_{22}-k_{12}^2}{m_1 m_2}} \tag{4.12}
\]
对式(4.12)根式下的式子作变换可以看出\(k_{11}k_{22}>k_{12}^2\),于是\(\omega_1^2\)和\(\omega_2^2\)都是正数。这样,特征方程(4.11)有两个正实根\(\omega_1^2\)和\(\omega_2^2\);故系统有两个频率\(\omega_1\)和\(\omega_2\)。这两个频率唯一地决定于系统的参数(质量和弹簧刚度),称为系统的固有频率。其中较低频率\(\omega_1\)称为第一阶固有频率,简称基频。较高频率\(\omega_2\)称为第二阶固有频率。
将\(\omega_1^2\)和\(\omega_2^2\)代入式(4.9),用\(u_1^{(1)}\)和\(u_2^{(1)}\)表示对应于\(\omega_1\)的值,用\(u_1^{(2)}\)和\(u_2^{(2)}\)表示对应于\(\omega_2\)的值,分别求出:
\[r_1 = \frac{u_2^{(1)}}{u_1^{(1)}} = -\frac{k_{11}-\omega_1^2 m_1}{k_{12}} = -\frac{k_{12}}{k_{22}-\omega_1^2 m_2} \tag{4.13a}
\]
\[r_2 = \frac{u_2^{(2)}}{u_1^{(2)}} = -\frac{k_{11}-\omega_2^2 m_1}{k_{12}} = -\frac{k_{12}}{k_{22}-\omega_2^2 m_2} \tag{4.13b}
\]
可见,只能求出比值\(r_1、r_2\),而不能唯一地确定\(u_1、u_2\)的具体值。\(r_1、r_2\)分别确定系统以频率\(\omega_1、\omega_2\)进行同步简谐运动时呈现的形状,称为系统的固有振型(亦称主振型)。与固有频率\(\omega_1\)相对应的\(\frac{u_2^{(1)}}{u_1^{(1)}}\)称为第一阶固有振型,与固有频率\(\omega_2\)相对应的\(\frac{u_2^{(2)}}{u_1^{(2)}}\)称为第二阶固有振型。可见,两自由度系统有两阶固有频率,相应地存在两阶固有振型。固有振型表示了系统的固有特性,对于一个给定的系统,以固有频率作振动的位形是一定的,而幅值是不唯一的。
将式(4.8)代入式(4.4)对应\(\omega_1\)有
\[\begin{cases}
x_1(t) = c u_1^{(1)} \cos(\omega_1 t - \varphi_1) = X_1^{(1)} \cos(\omega_1 t - \varphi_1) \\
x_2(t) = c u_2^{(1)} \cos(\omega_1 t - \varphi_1) = r_1 X_1^{(1)} \cos(\omega_1 t - \varphi_1)
\end{cases} \tag{4.14a}
\]
对应\(\omega_2\)有
\[\begin{cases}
x_1(t) = c u_1^{(2)} \cos(\omega_2 t - \varphi_2) = X_1^{(2)} \cos(\omega_2 t - \varphi_2) \\
x_2(t) = c u_2^{(2)} \cos(\omega_2 t - \varphi_2) = r_2 X_1^{(2)} \cos(\omega_2 t - \varphi_2)
\end{cases} \tag{4.14b}
\]
(4.14)的两个式子给出了两自由度系统的两阶固有振动,对于在任意初始条件下的自由振动,应由它们的叠加求得,即
\[\begin{cases}
x_1(t) = X_1^{(1)} \cos(\omega_1 t - \varphi_1) + X_1^{(2)} \cos(\omega_2 t - \varphi_2) \\
x_2(t) = r_1 X_1^{(1)} \cos(\omega_1 t - \varphi_1) + r_2 X_1^{(2)} \cos(\omega_2 t - \varphi_2)
\end{cases} \tag{4.15}
\]
式中\(X_1^{(1)}、X_1^{(2)}\)及\(\varphi_1、\varphi_2\)由初始条件确定。
式(4.15)表示不同频率的两个简谐振动的叠加,通常不再是简谐运动,而且除\(\omega_1\)与\(\omega_2\)可以通约的情况之外,也不是周期运动。
例4.1
在图 4.3 所示的系统中,令\(m_1=m,m_2=2m,k_1=k_2=k,k_3=2k\),试求固有振型。
解:由式(4.2)得
\[\begin{cases}
k_{11}=k_1+k_2=2k,\quad k_{22}=k_2+k_3=3k \\
k_{12}=-k_2=-k
\end{cases} \tag{1}
\]
于是,由式(4.11)得频率方程为
\[\Delta(\omega^2)=2m^2 \omega^4 - 7mk\omega^2 + 5k^2 = 0 \tag{2}
\]
其根为
\[\omega_{1,2}^2 = \left[\frac{7}{4} \mp \sqrt{\left(\frac{7}{4}\right)^2-\frac{5}{2}}\right]\frac{k}{m}
=
\begin{cases}
\displaystyle \frac{k}{m} \\[4pt]
\displaystyle \frac{5k}{2m}
\end{cases} \tag{3}
\]
固有频率为
\[\omega_1=\sqrt{\frac{k}{m}},\quad \omega_2=1.5811\sqrt{\frac{k}{m}} \tag{4}
\]
将\(\omega_1^2\)和\(\omega_2^2\)代入式(4.13)得
\[\begin{align*}
r_1 &= \frac{u_2^{(1)}}{u_1^{(1)}} = -\frac{k_{11}-\omega_1^2 m_1}{k_{12}}
= -\frac{2k-(k/m)m}{-k} = 1 \\
r_2 &= \frac{u_2^{(2)}}{u_1^{(2)}} = -\frac{k_{11}-\omega_2^2 m_1}{k_{12}}
= -\frac{2k-(5k/2m)m}{-k} = -0.5
\end{align*} \tag{5}
\]
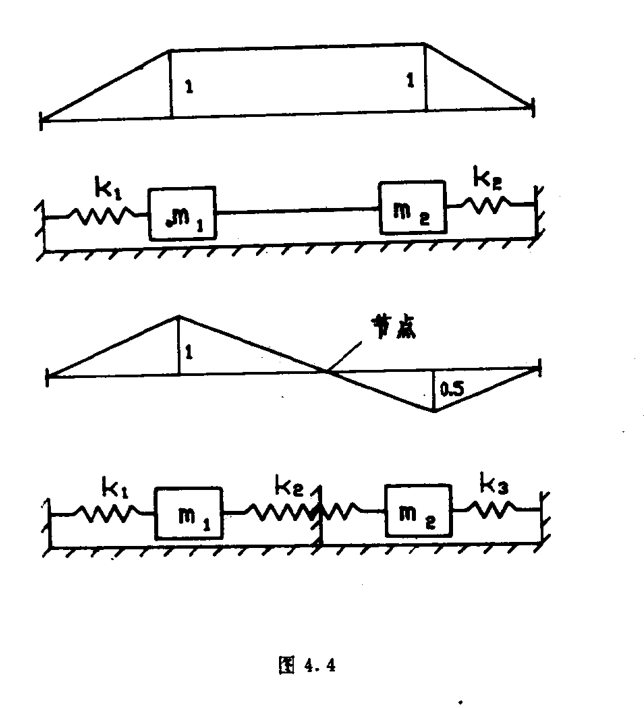
将式(5)绘于图 4.4,称振型图。在第一振型中,两个质量以相同的振幅作同向运动,则中间弹簧无变形,可以用无重刚杆代替。在第二振型中,两质量以振幅比为\(1:0.5\)反向运动,因此在离质量\(m_2\)的\(1/3\)处固定不动,称为节点。
![image-20260620020813993]()
参考文献
振动分析及应用 王彬 4.1