第二章 多自由度系统的振动
2.3 无阻尼系统的自由振动
为了方便地揭示振动系统的一些基本特性,往往先忽略系统中阻尼的影响,分析理想化的无阻尼系统。本节先分析二自由度系统的自由振动,然后将之推广到多自由度系统。
2.3.1 二自由度系统的固有振动
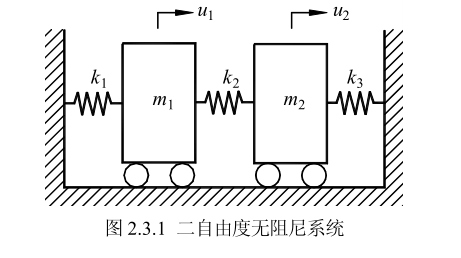
无阻尼的二自由度自由振动系统,如图2.3.1所示。如果该系统在 \(t=0\) 时刻前受到扰动,则 \(t>0\) 后的自由振动响应由下述微分方程组和初始条件确定
\[\begin{cases}
\boldsymbol{M}\ddot{\boldsymbol{u}}(t)+\boldsymbol{K}\boldsymbol{u}(t)=\boldsymbol{0}\\
\boldsymbol{u}(0)=\boldsymbol{u}_0,\ \dot{\boldsymbol{u}}(0)=\dot{\boldsymbol{u}}_0
\end{cases} \tag{2.3.1}
\]
式中符号的含意与2.1节中相同。
![image-20260620223040554]()
图2.3.1 二自由度无阻尼系统(\(k_1,m_1,k_2,m_2,k_3\) 依次串联布置)
单自由度无阻尼系统的自由振动是简谐运动,这启发我们设想二自由度无阻尼系统也有类似的自由振动。由于系统有两个自由度,它们各自的运动未必有相同幅值。所以,将方程(2.3.1)的试解写作
\[\boldsymbol{u}(t)=\boldsymbol{\varphi}\sin(\omega t+\theta)\stackrel{def}{=}\begin{bmatrix}\varphi_1\\\varphi_2\end{bmatrix}\sin(\omega t+\theta) \tag{2.3.2}
\]
其中 \(\boldsymbol{\varphi}\) 是表述振幅的二维向量。把试解(2.3.2)代入方程(2.3.1),欲使其在任意时刻都成立必有如下关系
\[(\boldsymbol{K}-\omega^2\boldsymbol{M})\boldsymbol{\varphi}=\boldsymbol{0} \tag{2.3.3}
\]
为了更明确起见,我们将式(2.3.3)展开,这样可以写作
\[\begin{cases}
(k_1+k_2-m_1\omega^2)\varphi_1-k_2\varphi_2=0\\
-k_2\varphi_1+(k_2+k_3-m_2\omega^2)\varphi_2=0
\end{cases} \tag{2.3.4}
\]
这是一个含未知数 \(\varphi_1\) 和 \(\varphi_2\) 的二元齐次线性代数方程组。可按上节的矩阵形式写为
\[\left(
\begin{bmatrix}
k_{11} & k_{12}\\
k_{21} & k_{22}
\end{bmatrix}
-\omega^2
\begin{bmatrix}
m_1 & 0\\
0 & m_2
\end{bmatrix}
\right)
\begin{bmatrix}
\varphi_1\\\varphi_2
\end{bmatrix}
=\boldsymbol{0} \tag{2.3.5}
\]
式中的 \(k_{11}、k_{12}、k_{21}\) 和 \(k_{22}\) 是刚度矩阵中的元素,可由(2.3.4)式得到。对于二自由度系统,系统矩阵是 \(2\times2\) 的对称矩阵。欲使系统振动,则应有非零解,这要求
\[\det\begin{bmatrix}
k_{11}-m_1\omega^2 & k_{12}\\
k_{21} & k_{22}-m_2\omega^2
\end{bmatrix}=0 \tag{2.3.6}
\]
其中 \(\det\) 代表对矩阵取行列式。把上述行列式展开,得到
\[(\omega^2)^2-\left(\frac{k_{11}}{m_1}+\frac{k_{22}}{m_2}\right)\omega^2+\frac{k_{11}k_{22}-k_{12}^2}{m_1m_2}=0 \tag{2.3.7}
\]
视其为关于 \(\omega^2\) 的二次代数方程,解出一对根
\[\omega_{1,2}^2=\frac{m_1k_{22}+m_2k_{11}}{2m_1m_2}\pm\frac{1}{2}\sqrt{\left(\frac{m_1k_{22}+m_2k_{11}}{m_1m_2}\right)^2-\frac{4\left(k_{11}k_{22}-k_{12}^2\right)}{m_1m_2}} \tag{2.3.8}
\]
稍加观察可见,\(\omega_1^2\) 和 \(\omega_2^2\) 均为非负实数,将其分别代回方程(2.3.5)求非零解,可确定两个实数值向量 \(\boldsymbol{\varphi}_1\) 和 \(\boldsymbol{\varphi}_2\),记作
\[\boldsymbol{\varphi}_1\stackrel{def}{=}\begin{bmatrix}\varphi_{11}\\\varphi_{21}\end{bmatrix},\quad
\boldsymbol{\varphi}_2\stackrel{def}{=}\begin{bmatrix}\varphi_{12}\\\varphi_{22}\end{bmatrix}
\]
因此,二自由度无阻尼系统的确可产生所猜想的振动
\[\boldsymbol{u}_r(t)=\boldsymbol{\varphi}_r \sin(\omega_r t+\theta_r)=
\begin{bmatrix}
\varphi_{1r}\\
\varphi_{2r}
\end{bmatrix}
\sin(\omega_r t+\theta_r),\quad r=1,2 \tag{2.3.10}
\]
上述分析说明,二自由度无阻尼系统具有两种不同固有频率 \(\omega_1\) 或 \(\omega_2\) 的同步自由振动,而式(2.3.8)表明这两个频率仅取决于原系统的弹性和惯性特性。仿照研究单自由度系统的术语,我们将这两个频率从小到大依次称为系统的第一阶固有频率和第二阶固有频率,相应的振动分别称为系统的第一阶固有振动和第二阶固有振动。
为了确定系统的固有振动,我们还需具体获得待定的振幅向量 \(\boldsymbol{\varphi}_1\) 和 \(\boldsymbol{\varphi}_2\)。为此将 \(\omega_1^2\) 代回式(2.3.5),从而得到 \(\boldsymbol{\varphi}_1\) 的分量 \(\varphi_{11}\) 和 \(\varphi_{21}\) 应满足的关系
\[\begin{cases}
(k_{11}-m_1\omega_1^2)\varphi_{11}+k_{12}\varphi_{21}=0\\
k_{21}\varphi_{11}+(k_{22}-m_2\omega_1^2)\varphi_{21}=0
\end{cases} \tag{2.3.11}
\]
由于 \(\omega_1^2\) 是在该方程组系数矩阵行列式为零条件下解出的根,所以方程的非零解有无穷多个,无法确定具体的 \(\varphi_{11}\) 和 \(\varphi_{21}\)。因此,只能确定系统作第一阶固有振动时的两质量块振幅之比
\[s_1\stackrel{def}{=}\frac{\varphi_{11}}{\varphi_{21}}=
-\frac{k_{22}-\omega_1^2m_2}{k_{21}}
=-\frac{k_{12}}{k_{11}-\omega_1^2m_1} \tag{2.3.12a}
\]
同理,将 \(\omega_2^2\) 代入式(2.3.5)可以得到系统第二阶固有振动时两质量块振幅之比
\[s_2\stackrel{def}{=}\frac{\varphi_{12}}{\varphi_{22}}=
-\frac{k_{22}-\omega_2^2m_2}{k_{21}}
=-\frac{k_{12}}{k_{11}-\omega_2^2m_2} \tag{2.3.12b}
\]
所以向量
\[\boldsymbol{\varphi}_1=\varphi_{21}\begin{bmatrix}s_1\\1\end{bmatrix},\quad
\boldsymbol{\varphi}_2=\varphi_{22}\begin{bmatrix}s_2\\1\end{bmatrix} \tag{2.3.13}
\]
反映了二自由度系统作固有振动时的形态,分别称之为第一阶和第二阶固有振动的振型,或简称固有振型。
固有振型是用向量形式来描述系统作固有振动时两坐标位移的比例关系。根据式(2.3.13)可看出固有振型的下述性质:
a. 固有振型 \(\boldsymbol{\varphi}_r\) 反映了二自由度系统作第 \(r\) 阶固有振动时两质量块的位移比例关系,说明图2.3.1中两质量块的固有振动总是同频率的简谐振动,但可能是同相(\(s_r>0\))或反相(\(s_r<0\))振动。
b. 对任一固有振型 \(\boldsymbol{\varphi}_r\) 和非零实数 \(\alpha\),\(\alpha\boldsymbol{\varphi}_r\) 仍是对应固有频率 \(\omega_r\) 的固有振型,即固有振型只能确定到相差一个实常数因子的程度。
例 2.3.1
设图2.3.1中二自由度系统的物理参数为 \(m_1=m_2=m\),\(k_1=k_3=k\),\(k_2=\mu k\),\(0<\mu\le1\),确定系统的固有振动。
解:将参数代入式(2.3.8),解得系统的两个固有频率分别为
\[\omega_1=\sqrt{\frac{k}{m}},\quad \omega_2=\sqrt{\frac{(1+2\mu)k}{m}} \tag{a}
\]
而两质量块振幅比可由式(2.3.12)得到
\[s_1=1,\quad s_2=-1 \tag{b}
\]
即系统的两个固有振型可取作
\[\boldsymbol{\varphi}_1=\alpha_1\begin{bmatrix}1\\1\end{bmatrix},\quad
\boldsymbol{\varphi}_2=\alpha_2\begin{bmatrix}1\\-1\end{bmatrix} \tag{c}
\]
所以该系统的两个固有振动形如
\[\boldsymbol{u}_1(t)=\alpha_1\begin{bmatrix}1\\1\end{bmatrix}\sin\left(\sqrt{\frac{k}{m}}t+\theta_1\right),\quad
\boldsymbol{u}_2(t)=\alpha_2\begin{bmatrix}1\\-1\end{bmatrix}\sin\left(\sqrt{\frac{(1+2\mu)k}{m}}t+\theta_2\right) \tag{d}
\]
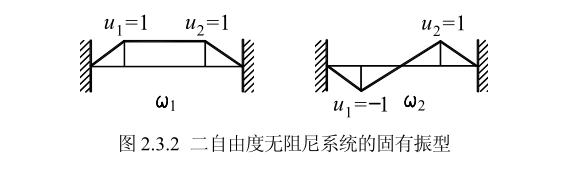
图2.3.2 二自由度无阻尼系统的固有振型,表示了该系统固有振动时两质量块的振动幅值关系。易见,每一阶固有振动都是同步自由振动,在振动中两质量块总是同时达到峰值或同时经过平衡位置。
![image-20260620223207063]()
该系统作第一阶固有振动时两质量块始终保持相同运动方向,且振幅相同,中间弹簧没有变形。而作第二阶固有振动时两质量块始终保持相反运动方向,且振幅也相同,故中间弹簧的中点总是静止不动的。这点称作系统对应该阶固有振动的节点。根据中间弹簧的变形特点,读者不难理解该系统两个固有频率的取值。
通过这一例题,读者可清楚地看到固有振型是怎样用向量形式描述系统固有振动时的运动模式的。通常,人们用模态来称呼系统的运动模式。因此,无阻尼系统的固有频率和固有振型被称作系统的固有模态,固有振型这一向量也常被称作模态向量。要说明的是,固有模态是指系统被理想化为无阻尼系统时的系统内在特性,只与系统的弹性和惯性有关。
如上所述,二自由度无阻尼系统的两种固有振动还仅是可能存在的运动形式。欲使系统真正产生这样的运动,应满足一定的运动初始条件。由式(2.3.10)可见,系统产生第 \(r\) 阶固有振动的初始条件是
\[\boldsymbol{u}(0)=\boldsymbol{\varphi}_r \sin\theta_r,\quad \dot{\boldsymbol{u}}(0)=\boldsymbol{\varphi}_r \omega_r \cos\theta_r,\quad r=1,2 \tag{2.3.14}
\]
这说明:为使系统产生第\(r\)阶固有振动,系统初始位移、初始速度必须与该阶固有振型成给定的比例关系。这是有别于单自由度无阻尼系统固有振动的。
2.3.2 二自由度系统的自由振动
如果二自由度系统的初始条件不满足式(2.3.14),其自由振动将不再是上述任何一阶固有振动。但根据线性常微分方程理论可知,二自由度无阻尼系统的任一自由振动总是这两种固有振动的线性组合,即
\[\boldsymbol{u}(t)=\alpha_1 \boldsymbol{u}_1(t)+\alpha_2 \boldsymbol{u}_2(t)=\alpha_1 \boldsymbol{\varphi}_1 \sin\left(\omega_1 t+\theta_1\right)+\alpha_2 \boldsymbol{\varphi}_2 \sin\left(\omega_2 t+\theta_2\right)
\]
或
\[\boldsymbol{u}(t)=\boldsymbol{\varphi}_1\left(a_1 \cos\omega_1 t+b_1 \sin\omega_1 t\right)+\boldsymbol{\varphi}_2\left(a_2 \cos\omega_2 t+b_2 \sin\omega_2 t\right) \tag{2.3.15}
\]
其中常数 \(\alpha_r\) 和 \(\theta_r\)(或 \(a_r\) 和 \(b_r\))\(r=1,2\) 由初始条件确定。
例 2.3.2
如果例2.3.1中系统的运动初始条件为
\[\boldsymbol{u}(0)=\begin{bmatrix}1\\0\end{bmatrix},\quad \dot{\boldsymbol{u}}(0)=\begin{bmatrix}0\\0\end{bmatrix} \tag{a}
\]
试确定系统的自由振动。
解:由例2.3.1的结果及式(2.3.15),系统的自由振动应为
\[\boldsymbol{u}(t)=\alpha_1\begin{bmatrix}1\\1\end{bmatrix}\sin\left(\omega_1 t+\theta_1\right)+\alpha_2\begin{bmatrix}1\\-1\end{bmatrix}\sin\left(\omega_2 t+\theta_2\right) \tag{b}
\]
求导得速度
\[\dot{\boldsymbol{u}}(t)=\alpha_1 \omega_1\begin{bmatrix}1\\1\end{bmatrix}\cos\left(\omega_1 t+\theta_1\right)+\alpha_2 \omega_2\begin{bmatrix}1\\-1\end{bmatrix}\cos\left(\omega_2 t+\theta_2\right) \tag{c}
\]
其中
\[\omega_1=\sqrt{\frac{k}{m}},\quad \omega_2=\sqrt{\frac{(1+2 \mu)k}{m}} \tag{d}
\]
将初始条件(a)代入式(b)和(c)得
\[\begin{cases}
\begin{bmatrix}1\\0\end{bmatrix}=\begin{bmatrix}1\\1\end{bmatrix}\alpha_1 \sin\theta_1+\begin{bmatrix}1\\-1\end{bmatrix}\alpha_2 \sin\theta_2\\
\begin{bmatrix}0\\0\end{bmatrix}=\begin{bmatrix}1\\1\end{bmatrix}\alpha_1 \omega_1 \cos\theta_1+\begin{bmatrix}1\\-1\end{bmatrix}\alpha_2 \omega_2 \cos\theta_2
\end{cases} \tag{e}
\]
先解(e)中第二式得
\[\cos \theta_1=\cos \theta_2=0,\quad \text{即}\quad \theta_1=\theta_2=\frac{\pi}{2} \tag{f}
\]
再解(e)中第一式得
\[\alpha_1=-\alpha_2=\frac{1}{2} \tag{g}
\]
故系统的自由振动为
\[\boldsymbol{u}(t)=\frac{1}{2}\begin{bmatrix}1\\1\end{bmatrix}\cos \omega_1 t+\frac{1}{2}\begin{bmatrix}1\\-1\end{bmatrix}\cos \omega_2 t \tag{h}
\]
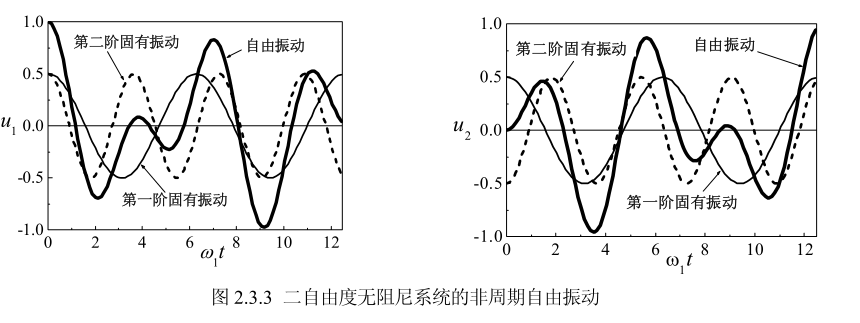
取 \(\mu=1\) 以使中间弹簧与两端弹簧刚度相同,系统的两个固有频率分别为 \(\omega_1=\sqrt{k/m}\) 和 \(\omega_2=\sqrt{3 k/m}\)。两个集中质量的自由振动如图2.3.3中粗实线所示,图中细实线对应第一阶固有振动,虚线对应第二阶固有振动。由于 \(\omega_1\) 和 \(\omega_2\) 之比是无理数,此时的自由振动不是简谐振动,而是两个不同频率成分的简谐振动合成的非周期振动。
因此,二自由度无阻尼系统的自由振动与单自由度无阻尼系统的自由振动有重大的区别。单自由度无阻尼系统的自由振动与固有振动属同一种振动,在任意初始条件下总是简谐的;而二自由度无阻尼系统的自由振动一般是两种不同频率固有振动的线性组合,未必是简谐振动,甚至可能是非周期的振动。
![image-20260620223240645]()
2.3.3 二自由度系统的运动耦合与解耦
我们在2.1节曾指出,二自由度系统有别于单自由度系统的基本特征之一是其运动具有耦合,这给我们的分析带来了一系列的新问题。为了更好地理解运动的耦合,我们回过头来看一下本章一开始提到的汽车振动问题。
例 2.3.3
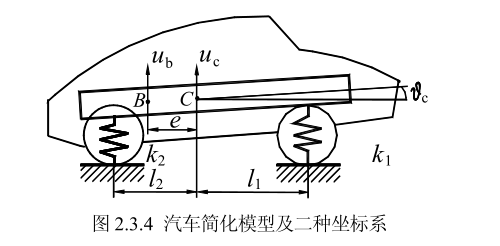
如图2.3.4所示,刚性车体质量为 \(m\)、绕质心 \(C\) 的转动惯量为 \(J\),试分析系统的运动耦合问题。
![image-20260620223311062]()
解:先按图2.3.4中质心 \(C\) 处的坐标系建立系统的运动微分方程。质心 \(C\) 的线位移 \(u_C\) 和角位移 \(\vartheta_C\) 引起两弹簧产生的恢复力分别为 \(k_1(u_C+l_1 \vartheta_C)\) 和 \(k_2(u_C-l_2 \vartheta_C)\),根据理论力学中刚体平面运动动力学方程,可写出
\[\begin{cases}
m\ddot{u}_C=-k_1(u_C+l_1\vartheta_C)-k_2(u_C-l_2 \vartheta_C)\\
J\ddot{\vartheta}_C=-k_1(u_C+l_1 \vartheta_C)l_1+k_2\left(u_C-l_2 \vartheta_C\right)l_2
\end{cases} \tag{a}
\]
将上式写成矩阵形式
\[\begin{bmatrix}
m & 0\\
0 & J
\end{bmatrix}
\begin{bmatrix}
\ddot{u}_C\\
\ddot{\vartheta}_C
\end{bmatrix}
+
\begin{bmatrix}
k_1+k_2 & k_1 l_1-k_2 l_2\\
k_1 l_1-k_2 l_2 & k_1 l_1^2+k_2 l_2^2
\end{bmatrix}
\begin{bmatrix}
u_C\\
\vartheta_C
\end{bmatrix}
=\boldsymbol{0} \tag{b}
\]
方程(b)表明,此时车体质心平动与绕质心转动引起的惯性力不耦合,但弹性力耦合,常称作弹性耦合。在方程(b)中,刚度矩阵的非对角线元素非零,故又称为刚度耦合。类似地,若一个系统的质量矩阵或阻尼矩阵中非对角线元素不为零,则称系统具有惯性耦合或阻尼耦合。
再选取另一组坐标系来分析系统的振动。指定车体上一点 \(B\),它距质心 \(C\) 的水平距离为 \(e\)(向右为正)。用车体在该点的铅垂位移 \(u_B\) 和绕该点的转角 \(\vartheta_B\) 为坐标来建立系统的运动微分方程。根据刚体的平面运动定理得
\[u_C=u_B+e \vartheta_B,\quad \vartheta_C=\vartheta_B \tag{c}
\]
将式(c)代入式(a)后整理,得到矩阵形式的运动微分方程
\[\begin{bmatrix}
m & m e\\
m e & J+m e^2
\end{bmatrix}
\begin{bmatrix}
\ddot{u}_B\\
\ddot{\vartheta}_B
\end{bmatrix}
+
\begin{bmatrix}
k_1+k_2 & k_1\left(l_1+e\right)-k_2\left(l_2-e\right)\\
k_1\left(l_1+e\right)-k_2\left(l_2-e\right) & k_1\left(l_1+e\right)^2+k_2\left(l_2-e\right)^2
\end{bmatrix}
\begin{bmatrix}
u_B\\
\vartheta_B
\end{bmatrix}
=\boldsymbol{0} \tag{d}
\]
显然,此时系统既有弹性耦合又有惯性耦合。
因 \(B\) 点到质心 \(C\) 的距离 \(e\) 具有任意性,我们可选择适当的 \(e\) 消除惯性耦合或弹性耦合(又称解耦)。消除惯性耦合的条件显然是 \(e=0\);而消除弹性耦合则需
\[k_1\left(l_1+e\right)-k_2\left(l_2-e\right)=0 \tag{e}
\]
即
\[e=\frac{k_2 l_2-k_1 l_1}{k_1+k_2} \tag{f}
\]
但这两者不可兼顾。
由这一例题可见,二自由度系统间的耦合取决于我们观察其运动时所选定的坐标系。坐标系选得适合则可使运动间消去某种耦合作用。自然,读者关心能否选到适宜的坐标系,使得运动完全不耦合,即系统质量矩阵和刚度矩阵同时是对角阵。如果这种坐标系存在,则称其为主坐标系。在主坐标系下,二自由度系统犹如两个彼此独立的单自由度系统。读者不妨可以对图2.0.1(b)所示的二自由度系统进行类似的解耦分析,并可以进一步分析图2.0.1所示的三自由度系统的解耦。
下面我们分析主坐标的选取方式。事实上,二自由度系统的运动总是发生在一个二维空间中,即平面之中;而平面中坐标系的选取有无穷多种。例2.3.3中的式(c)实际上是给出了两种不同坐标系之间的变换关系,通过这种变换,可以使系统自由度之间的耦合发生转变。例如,取 \(u_1\) 和 \(u_2\) 为坐标系时,由线性变换
\[\begin{bmatrix}
q_1\\
q_2
\end{bmatrix}
=\boldsymbol{\Psi}
\begin{bmatrix}
u_1\\
u_2
\end{bmatrix}
\stackrel{def}{=}
\begin{bmatrix}
\psi_{11} & \psi_{12}\\
\psi_{21} & \psi_{22}
\end{bmatrix}
\begin{bmatrix}
u_1\\
u_2
\end{bmatrix} \tag{2.3.17}
\]
应有
\[\begin{bmatrix}
u_1\\
u_2
\end{bmatrix}
=\boldsymbol{\Psi}^{-1}
\begin{bmatrix}
q_1\\
q_2
\end{bmatrix} \tag{2.3.18}
\]
确定的 \(q_1\) 和 \(q_2\) 是另一坐标系。为了能用 \(q_1\) 和 \(q_2\) 唯一地表示 \(u_1\) 和 \(u_2\),矩阵 \(\boldsymbol{\Psi}\) 应是可逆的。
一般 \(u_1\) 和 \(u_2\) 是我们建立系统运动微分方程时用的坐标,它具有物理含意而被称作物理坐标;但 \(q_1\) 和 \(q_2\) 可能不易直观看出其物理意义,从而称为广义坐标。
现在把二自由度无阻尼系统的固有振型向量 \(\boldsymbol{\varphi}_1\) 和 \(\boldsymbol{\varphi}_2\) 装配成一个矩阵
\[\boldsymbol{\Phi}=\begin{bmatrix}\boldsymbol{\varphi}_1 & \boldsymbol{\varphi}_2\end{bmatrix} \tag{2.3.19}
\]
称为固有振型矩阵,可证明它是可逆阵。用 \(\boldsymbol{\Phi}\) 来代替式(2.3.18)中的 \(\boldsymbol{\Psi}^{-1}\),即引入广义坐标 \(q_1\) 和 \(q_2\),使
\[\begin{bmatrix}
u_1\\
u_2
\end{bmatrix}
=\boldsymbol{\Phi}
\begin{bmatrix}
q_1\\
q_2
\end{bmatrix}
=\boldsymbol{\varphi}_1 q_1+\boldsymbol{\varphi}_2 q_2 \quad(2.3.20)
\]
这种广义坐标 \(q_1\) 和 \(q_2\) 在几何上并不直观,但它反映了每一固有振型对系统运动的“贡献”量,故称之为模态坐标。这样的变换称为模态变换,可以实现系统方程的完全解耦。
例 2.3.4
对例2.3.1的系统进行解耦。
解:根据例2.3.1的分析,得到
\[\boldsymbol{\Phi}=\begin{bmatrix}1 & -1 \\ 1 & 1\end{bmatrix} \tag{a}
\]
将坐标变换式(2.3.20)代入二自由度无阻尼系统运动微分方程(2.3.1),并左乘 \(\boldsymbol{\Phi}^T\),得到
\[\begin{cases}
2 m \ddot{q}_1+2 k q_1=0 \\
2 m \ddot{q}_2+2(1+2 \mu) k q_2=0
\end{cases} \tag{b}
\]
进一步可以写成
\[\begin{cases}
\ddot{q}_1+\omega_1^2 q_1=0 \\
\ddot{q}_2+\omega_2^2 q_2=0
\end{cases} \tag{c}
\]
这说明模态坐标正是我们要寻找的主坐标,它使二自由度无阻尼系统的运动完全解耦为两个单自由度无阻尼系统,其固有频率就是所对应阶的固有频率。
2.3.4 多自由度系统的固有振动
(1) 固有振动的形式及条件
多自由度系统方程的矩阵形式与二自由度系统的类似。因此在选定的物理坐标 \(\boldsymbol{u}\) 下,无阻尼系统的自由振动应服从下述微分方程的初值问题
\[\begin{cases}
\boldsymbol{M}\ddot{\boldsymbol{u}}(t)+\boldsymbol{K}\boldsymbol{u}(t)=\boldsymbol{0} \\
\boldsymbol{u}(0)=\boldsymbol{u}_0,\ \dot{\boldsymbol{u}}(0)=\dot{\boldsymbol{u}}_0
\end{cases} \tag{2.3.21}
\]
无论从线性微分方程理论还是从物理直观出发,我们都可设想系统会产生同频率、同相位但各质点不同振幅的振动
\[\boldsymbol{u}(t)=\boldsymbol{\varphi}\sin (\omega t+\theta) \tag{2.3.22}
\]
其中 \(\omega\) 和 \(\theta\) 是标量,\(\boldsymbol{\varphi}\) 是 \(N\) 维向量。将上式代入式(2.3.21a),得这一运动需满足的条件是存在非零向量 \(\boldsymbol{\varphi}\) 使
\[\left(\boldsymbol{K}-\omega^2 \boldsymbol{M}\right)\boldsymbol{\varphi}=\boldsymbol{0} \quad(2.3.23)
\]
或记作
\[(\boldsymbol{K}-\lambda \boldsymbol{M})\boldsymbol{\varphi}=\boldsymbol{0},\quad \lambda \stackrel{def}{=} \omega^2 \tag{2.3.24}
\]
按照线性代数的语言,这是矩阵束 \(\boldsymbol{K}\) 和 \(\boldsymbol{M}\) 的广义特征值问题,标量 \(\lambda\) 和对应的非零向量 \(\boldsymbol{\varphi}\) 分别称为特征值和相应的特征向量。由线性代数可知,式(2.3.24)有非零解向量 \(\boldsymbol{\varphi}\) 的充要条件是
\[\det(\boldsymbol{K}-\lambda \boldsymbol{M})=0 \tag{2.3.25}
\]
这是一个关于 \(\lambda\) 的 \(N\) 次代数方程,称作特征方程。从理论上讲,求解广义特征值问题(2.3.24)就是由特征方程(2.3.25)解出特征根 \(\lambda_r\),\(r=1,\cdots,N\),然后逐一代回式(2.3.24),寻求齐次线性代数方程的非零解向量 \(\boldsymbol{\varphi}_r\),\(r=1,\cdots,N\)。
对于振动问题,由质量矩阵的正定性及刚度矩阵的半正定性可知,任意的特征向量 \(\boldsymbol{\varphi}_r\),\(r=1,\cdots,N\) 总使得
\[M_{r}=\boldsymbol{\varphi}_r^{T} \boldsymbol{M} \boldsymbol{\varphi}_r>0,\quad K_{r}=\boldsymbol{\varphi}_r^{T} \boldsymbol{K} \boldsymbol{\varphi}_r \geq 0 \quad (2.3.26)
\]
这里的 \(M_r\) 和 \(K_r\) 分别定义为模态质量和模态刚度。所以,用 \(\boldsymbol{\varphi}_r^T\) 左乘式(2.3.24)后可解出
\[\lambda_{r}=\frac{\boldsymbol{\varphi}_{r}^{T} \boldsymbol{K} \boldsymbol{\varphi}_{r}}{\boldsymbol{\varphi}_{r}^{T} \boldsymbol{M} \boldsymbol{\varphi}_{r}}=\frac{K_{r}}{M_{r}} \geq 0 \quad (2.3.27)
\]
即由矩阵 \(\boldsymbol{K}\) 和 \(\boldsymbol{M}\) 确定的特征值 \(\lambda_r\) 均为非负实数。因此,可引入 \(\omega_r=\sqrt{\lambda_r}\),并将诸 \(\omega_r\) 排列为
\[0 \leq \omega_{1} \leq \omega_{2} \leq \cdots \leq \omega_{N-1} \leq \omega_{N} \quad (2.3.28)
\]
将所得到的非负特征值 \(\lambda_r\) 代回式(2.3.24),可得到实系数齐次线性方程
\[\left(\boldsymbol{K}-\lambda_{r} \boldsymbol{M}\right) \boldsymbol{\varphi}_{r}=0,\quad r=1,\cdots,N \quad(2.3.29)
\]
由此确定的特征向量 \(\boldsymbol{\varphi}_r\) 自然也是实向量,也称为系统的固有振型。因对于任意非零实常数 \(\alpha\),\(\alpha \boldsymbol{\varphi}_r\) 仍是对应特征值 \(\lambda_r\) 的特征向量,所以 \(\boldsymbol{\varphi}_r\) 仅能确定到各分量间比例不变的程度,需要确定这一非零实常数。使用的人彼此偏爱有所不同,所取的实常数也不相同,这无疑会给交流问题带来不便。人们通常约定以下几种实常数的取法,并称其为固有振型的归一化或正则化。
a. 按某一自由度的幅值归一化:选定其中某个自由度 \(n\),各阶固有振型中此自由度的分量均为非零的,则归一化后的固有振型即为
\[\boldsymbol{\varphi}_{r}^{*}=\frac{\boldsymbol{\varphi}_{r}}{\varphi_{r n}},\quad r=1,\cdots,N \quad(2.3.30)
\]
这里也可以对不同阶特征向量选定不同的自由度。
b. 按诸自由度中最大幅值归一化:选取各阶特征向量中绝对值最大的分量,取代上式中的 \(\varphi_{rn}\)。
c. 按模态质量归一化:根据式(2.3.26),这样归一处理后的固有振型为
\[\boldsymbol{\varphi}_{r}^{*}=\frac{\boldsymbol{\varphi}_{r}}{\sqrt{\boldsymbol{\varphi}_{r}^{T} \boldsymbol{M} \boldsymbol{\varphi}_{r}}},\quad r=1,\cdots,N \tag{2.3.31}
\]
这几种归一化振型各有特色。譬如第b种使我们一眼即可看出系统某阶固有振动时振动最大的部位,第c种在理论上常使问题的叙述变得方便。实际使用时应按需选择。
根据上述分析,式(2.3.22)中的 \(\omega\) 和 \(\boldsymbol{\varphi}\) 都是能够确定的,从而系统的确可产生猜想的振动
\[\boldsymbol{u}_{r}(t)=\boldsymbol{\varphi}_{r} \sin \left(\omega_{r} t+\theta_{r}\right),\quad r=1,\cdots,N \quad(2.3.32)
\]
其运动特征是系统中各质点以同一频率 \(\omega_r\) 和同一初相位 \(\theta_r\) 振动,而振幅按特征向量 \(\boldsymbol{\varphi}_r\) 规定的比例分配。我们将无阻尼系统的这种自由振动称作其第 \(r\) 阶固有振动,称 \(\omega_r\) 为它的第 \(r\) 阶固有频率,\(\boldsymbol{\varphi}_r\) 为它的第 \(r\) 阶固有振型。这两者又常合在一起,被称作第 \(r\) 阶固有模态。
根据系统的初始条件(2.3.21b),第 \(r\) 阶固有振动在初始时刻应满足
\[\boldsymbol{u}_{r}(0)=\boldsymbol{\varphi}_{r} \sin \theta_{r},\quad \dot{\boldsymbol{u}}_{r}(0)=\omega_{r} \boldsymbol{\varphi}_{r} \cos \theta_{r},\quad r=1,\cdots,N \quad(2.3.33)
\]
如果上述条件不能满足,系统的自由振动将是各阶固有振动的线性组合
\[\boldsymbol{u}(t)=\sum_{r=1}^{N} \alpha_{r} \boldsymbol{\varphi}_{r} \sin \left(\omega_{r} t+\theta_{r}\right)=\sum_{r=1}^{N} \boldsymbol{\varphi}_{r}\left(a_{r} \cos \omega_{r} t+b_{r} \sin \omega_{r} t\right)
\]
其中实常数 \(\alpha_r\),\(\theta_r\) 或等价的 \(a_r\),\(b_r\),\(r=1,\cdots,N\) 可由初始条件确定,其方法见2.3.6节。
(2) 固有振型的性质
a. 固有振型关于质量矩阵和刚度矩阵的加权正交性
任取系统的两个固有振型 \(\boldsymbol{\varphi}_r\) 和 \(\boldsymbol{\varphi}_s\),它们应满足
\[\begin{cases}
\boldsymbol{K} \boldsymbol{\varphi}_{r}=\omega_{r}^{2} \boldsymbol{M} \boldsymbol{\varphi}_{r} \\
\boldsymbol{K} \boldsymbol{\varphi}_{s}=\omega_{s}^{2} \boldsymbol{M} \boldsymbol{\varphi}_{s}
\end{cases} \quad r,s=1,\cdots,N \tag{a}
\]
由此不难得到
\[\begin{cases}
\boldsymbol{\varphi}_{s}^{T} \boldsymbol{K} \boldsymbol{\varphi}_{r}=\omega_{r}^{2} \boldsymbol{\varphi}_{s}^{T} \boldsymbol{M} \boldsymbol{\varphi}_{r}\\
\boldsymbol{\varphi}_{r}^{T} \boldsymbol{K} \boldsymbol{\varphi}_{s}=\omega_{s}^{2} \boldsymbol{\varphi}_{r}^{T} \boldsymbol{M} \boldsymbol{\varphi}_{s}
\end{cases} \tag{b}
\]
将式(b)中两式相减得
\[\left(\omega_{r}^{2}-\omega_{s}^{2}\right) \boldsymbol{\varphi}_{r}^{T} \boldsymbol{M} \boldsymbol{\varphi}_{s}=0 \tag{c}
\]
如果系统不存在相同的频率(重频),则 \(\omega_r^2 \neq \omega_s^2,\ r \neq s\),于是
\[\boldsymbol{\varphi}_{r}^{T} \boldsymbol{M} \boldsymbol{\varphi}_{s}=0,\quad r \neq s \quad(2.3.35a)
\]
将它代回式(b)得
\[\boldsymbol{\varphi}_{r}^{T} \boldsymbol{K} \boldsymbol{\varphi}_{s}=0,\quad r \neq s \quad(2.3.35b)
\]
式(2.3.35)说明,互异固有频率所对应的固有振型关于质量矩阵、刚度矩阵加权正交。这是无阻尼系统固有振型最重要的性质。由后面的讨论将看到,这一性质表明无阻尼系统各阶固有振动间的能量是不耦合的。
加权正交关系(2.3.35)还可写成更一般的形式
\[\boldsymbol{\varphi}_{r}^{T} \boldsymbol{M} \boldsymbol{\varphi}_{s}=M_{r} \delta_{r s},\quad \boldsymbol{\varphi}_{r}^{T} \boldsymbol{K} \boldsymbol{\varphi}_{s}=K_{r} \delta_{r s} \quad(2.3.36)
\]
其中
\[\delta_{r s} \stackrel{def}{=}
\begin{cases}
1, & r=s \\
0, & r \neq s
\end{cases}
\]
称作Kronecker符号,\(M_r\) 和 \(K_r\) 的定义见式(2.3.26),它们分别称作对应第 \(r\) 阶固有模态的广义质量和广义刚度,简称模态质量和模态刚度。根据式(2.3.26),若固有振型已关于模态质量归一化,则加权正交关系为
\[\boldsymbol{\varphi}_{r}^{T} \boldsymbol{M} \boldsymbol{\varphi}_{s}=\delta_{r s},\quad \boldsymbol{\varphi}_{r}^{T} \boldsymbol{K} \boldsymbol{\varphi}_{s}=\omega_{r}^{2} \delta_{r s} \quad(2.3.38)
\]
b. 固有振型的线性无关性
所谓固有振型的线性无关性是指,仅有全为零的一组常数 \(\alpha_r\),\(r=1,\cdots,N\) 方能使
\[\sum_{r=1}^{N} \alpha_{r} \boldsymbol{\varphi}_{r}=\boldsymbol{0} \quad(2.3.39)
\]
事实上,将上式两端左乘 \(\boldsymbol{\varphi}_s^T \boldsymbol{M}\) 后利用加权正交条件(2.3.35a)可得
\[\boldsymbol{\varphi}_{s}^{T} \boldsymbol{M} \sum_{r=1}^{N} \alpha_{r} \boldsymbol{\varphi}_{r}=\sum_{r=1}^{N} \alpha_{r} \boldsymbol{\varphi}_{s}^{T} \boldsymbol{M} \boldsymbol{\varphi}_{r}=\alpha_{s} \boldsymbol{\varphi}_{s}^{T} \boldsymbol{M} \boldsymbol{\varphi}_{s}=0
\]
矩阵 \(\boldsymbol{M}\) 正定保证了 \(\alpha_s\),\(s=1,\cdots,N\) 全为零,从而诸 \(\boldsymbol{\varphi}_r\),\(r=1,\cdots,N\) 的确线性无关。
c. 刚体模态
飞机、车辆等运载工具及旋转机械中的轴系都是可作刚体运动的系统。这类系统可以产生无弹性变形的刚体运动
\[\boldsymbol{u}_{r}(t)=\boldsymbol{\varphi}_{0}\left(a_{0}+b_{0} t\right) \quad(2.3.41)
\]
其中 \(a_0\) 和 \(b_0\) 是由初始条件确定的常数,\(\boldsymbol{\varphi}_0\) 描述了系统作刚体运动时各自由度位移间的相对比例,称作刚体运动振型。
将式(2.3.41)代入系统自由振动方程(2.3.1)可见,这样的刚体运动将要求振型 \(\boldsymbol{\varphi}_0\) 满足
\[\boldsymbol{K} \boldsymbol{\varphi}_{0}=\boldsymbol{0} \quad(2.3.42)
\]
这一齐次线性方程有非零解 \(\boldsymbol{\varphi}_0\) 的条件是矩阵 \(\boldsymbol{K}\) 奇异。由此还得到 \(\boldsymbol{\varphi}_0^T \boldsymbol{K} \boldsymbol{\varphi}_0=0\),即系统刚体运动不产生弹性势能。
再将式(2.3.42)与弹性振动的广义特征值问题(2.3.23)比较可知,刚体运动振型对应于系统广义特征值为零、即零频率的情况。因此,将零固有频率及相应的刚体运动振型一并称作刚体模态。我们在提出自由振动模式时的试探解是正弦型的,它不能包括式(2.3.41)这种刚体运动模式。我们用式(2.3.41)作为刚体运动的试探解一方面出于物理直观,另一方面基于线性常微分方程组解结构的一般理论。
由刚度法不难证明,系统刚体运动自由度数等于系统刚度矩阵 \(\boldsymbol{K}\) 的阶数与秩之差。而根据线性代数,这一差值就是方程(2.3.42)线性无关非零解的个数。因此,具有 \(n>1\) 个刚体运动自由度的系统具有 \(n\) 个线性无关的刚体运动振型,从而对应 \(n\) 重零频率。
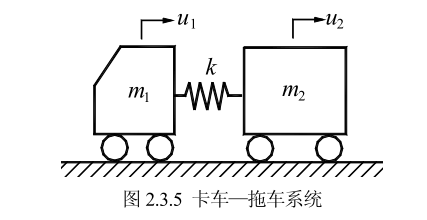
例 2.3.4(卡车-拖车系统)
分析图2.3.5所示的卡车-拖车系统的固有振动。
![image-20260620223336600]()
系统在图示坐标系中的运动微分方程为
\[\begin{bmatrix}
m_{1} & 0 \\
0 & m_{2}
\end{bmatrix}
\begin{bmatrix}
\ddot{u}_{1} \\
\ddot{u}_{2}
\end{bmatrix}
+
\begin{bmatrix}
k & -k \\
-k & k
\end{bmatrix}
\begin{bmatrix}
u_{1} \\
u_{2}
\end{bmatrix}
=\boldsymbol{0} \tag{a}
\]
对应的广义特征值问题为
\[\begin{bmatrix}
k-m_{1}\omega^{2} & -k \\
-k & k-m_{2}\omega^{2}
\end{bmatrix}
\boldsymbol{\varphi}=\boldsymbol{0} \tag{b}
\]
解出系统的二个固有频率
\[\omega_{1}=0,\quad \omega_{2}=\sqrt{\frac{m_{1}+m_{2}}{m_{1} m_{2}}k} \tag{c}
\]
相应的固有振型为
\[\boldsymbol{\varphi}_{1}=\begin{bmatrix}1\\1\end{bmatrix}^{T},\quad
\boldsymbol{\varphi}_{2}=\begin{bmatrix}1\\-\dfrac{m_{1}}{m_{2}}\end{bmatrix}^{T} \tag{d}
\]
系统的运动由刚体运动叠加简谐振动而成
\[\boldsymbol{x}(t)=\begin{bmatrix}1\\1\end{bmatrix}(a_{1} t+b_{1})
+\begin{bmatrix}1\\-\dfrac{m_{1}}{m_{2}}\end{bmatrix}(a_{2} \cos\omega_{2} t+b_{2} \sin\omega_{2} t) \tag{e}
\]
其中常数 \(a_1,a_2,b_1,b_2\) 由初始条件确定。
d. 小结
至此,可以说 \(N\) 自由度无阻尼系统总有 \(N\) 个线性无关的固有振型 \(\boldsymbol{\varphi}_r\),\(r=1,\cdots,N\),它们中的任意二个均关于系统质量矩阵和刚度矩阵加权正交。若引入固有振型矩阵
\[\boldsymbol{\Phi}\stackrel{def}{=}\begin{bmatrix}\boldsymbol{\varphi}_1 & \boldsymbol{\varphi}_2 & \dots & \boldsymbol{\varphi}_N\end{bmatrix} \tag{2.3.43}
\]
则它是可逆方阵,并且满足矩阵形式的正交关系
\[\boldsymbol{\Phi}^{T} \boldsymbol{M} \boldsymbol{\Phi}=\mathrm{diag}\left[M_{r}\right] \tag{2.3.44a}
\]
\[\boldsymbol{\Phi}^{T} \boldsymbol{K} \boldsymbol{\Phi}=\mathrm{diag}\left[K_{r}\right] \tag{2.3.44b}
\]
若上述固有振型向量已关于模态质量归一化,则式(2.3.44)可简化为
\[\boldsymbol{\Phi}^{T} \boldsymbol{M} \boldsymbol{\Phi}=\boldsymbol{I},\quad
\boldsymbol{\Phi}^{T} \boldsymbol{K} \boldsymbol{\Phi}=\boldsymbol{\Omega}^{2}=\mathrm{diag}[\omega_{r}^{2}] \tag{2.3.45}
\]
2.3.5 运动解耦
根据2.3.4节的讨论,\(N\) 自由度无阻尼系统总有 \(N\) 个线性无关的固有振型 \(\boldsymbol{\varphi}_r\),\(r=1,\cdots,N\),因此,可用它作基底来张成描述系统运动的空间。引入坐标变换
\[\boldsymbol{u}=\boldsymbol{\Phi}\boldsymbol{q} \tag{2.3.46}
\]
其中固有振型矩阵 \(\boldsymbol{\Phi}\) 如(2.3.43)所定义,\(N\) 维列向量 \(\boldsymbol{q}\) 称作模态坐标。
由2.3.4节的分析,系统在物理坐标下的运动微分方程(2.3.21)将转换为模态坐标下的形式
\[M_{r} \ddot{q}_{r}(t)+K_{r} q_{r}(t)=0,\quad r=1,\cdots,N \tag{2.3.47}
\]
由加权正交性条件(2.3.44)知,模态坐标下的质量矩阵、刚度矩阵是对角阵,因此方程(2.3.47)已是独立的 \(N\) 个标量函数 \(q_r(t)\) 的微分方程。这说明在模态坐标下系统的运动是解耦的。解耦的系统运动正是它的 \(N\) 个固有振动
\[q_{r}(t)=a_{r} \cos\omega_{r} t+b_{r} \sin\omega_{r} t,\quad r=1,\cdots,N \quad(2.3.49)
\]
2.3.6 多自由度系统的自由振动
我们在2.3.4节已指出,多自由度系统产生固有振动必须满足特定初始条件,否则系统自由振动是各阶固有振动的线性叠加。现在我们讨论如何由给定的初始条件来确定自由振动。先讨论无刚体自由度的系统,由式(2.3.46)和(2.3.49)可见
\[\begin{aligned}
\boldsymbol{u}(t) &=\boldsymbol{\Phi}\boldsymbol{q}(t)=\boldsymbol{\Phi}\begin{bmatrix}
a_{1}\cos\omega_{1} t+b_{1}\sin\omega_{1} t\\
\vdots\\
a_{N}\cos\omega_{N} t+b_{N}\sin\omega_{N} t
\end{bmatrix}\\
&=\boldsymbol{\Phi}\mathrm{diag}[\cos\omega_{r} t]\boldsymbol{a}+\boldsymbol{\Phi}\mathrm{diag}[\sin\omega_{r} t]\boldsymbol{b}
\end{aligned} \tag{2.3.50}
\]
其中
\[\boldsymbol{a}\stackrel{def}{=}[a_{1},\dots,a_{N}]^{T},\quad
\boldsymbol{b}\stackrel{def}{=}[b_{1},\dots,b_{N}]^{T} \tag{2.3.51}
\]
对于给定的初始条件 \(\boldsymbol{u}_0\) 和 \(\dot{\boldsymbol{u}}_0\),由式(2.3.50)及其导数可得到
\[\boldsymbol{u}_{0}=\boldsymbol{\Phi}\boldsymbol{a},\quad \dot{\boldsymbol{u}}_{0}=\boldsymbol{\Phi}\mathrm{diag}[\omega_{r}]\boldsymbol{b} \tag{2.3.52}
\]
由于固有振型矩阵 \(\boldsymbol{\Phi}\) 可逆,可解出参数向量
\[\boldsymbol{a}=\boldsymbol{\Phi}^{-1}\boldsymbol{u}_{0},\quad
\boldsymbol{b}=\mathrm{diag}\left[\frac{1}{\omega_{r}}\right]\boldsymbol{\Phi}^{-1}\dot{\boldsymbol{u}}_{0} \tag{2.3.53}
\]
因此,可以把系统的自由振动写作
\[\begin{aligned}
\boldsymbol{u}(t)&=\boldsymbol{\Phi}\mathrm{diag}[\cos\omega_{r} t]\boldsymbol{\Phi}^{-1}\boldsymbol{u}_{0}
+\boldsymbol{\Phi}\mathrm{diag}\left[\frac{\sin\omega_{r} t}{\omega_{r}}\right]\boldsymbol{\Phi}^{-1}\dot{\boldsymbol{u}}_{0}\\
&=\boldsymbol{U}(t)\boldsymbol{u}_{0}+\boldsymbol{V}(t)\dot{\boldsymbol{u}}_{0}
\end{aligned} \tag{2.3.54}
\]
其中
\[\boldsymbol{U}(t)\stackrel{def}{=}\boldsymbol{\Phi}\mathrm{diag}[\cos\omega_{r} t]\boldsymbol{\Phi}^{-1},\quad
\boldsymbol{V}(t)\stackrel{def}{=}\boldsymbol{\Phi}\mathrm{diag}\left[\frac{\sin\omega_{r} t}{\omega_{r}}\right]\boldsymbol{\Phi}^{-1} \tag{2.3.55}
\]
代表各自自由度分别具有单位初始位移和单位初始速度引起的系统自由振动。
实际计算中,为了避免求解上述三式中的固有振型矩阵之逆 \(\boldsymbol{\Phi}^{-1}\),可采用关于模态质量归一化的固有振型矩阵 \(\boldsymbol{\Phi}\)。根据加权正交关系(2.3.45)中第一式,易见
\[\boldsymbol{\Phi}^{-1}=\boldsymbol{\Phi}^{T} \boldsymbol{M} \tag{2.3.56}
\]
如果系统具有刚体自由度,自由振动中还有刚体位移成分。由于刚体模态与弹性模态线性无关,可以完全类似地确定系统的运动。
例 2.3.5
设图2.3.5中卡车-拖车系统在 \(t<0\) 时静止,\(t=0^-\) 时一汽车迎面与卡车相撞后立即反弹脱离,卡车受到冲量 \(F_0\) 作用,试确定 \(t>0\) 后卡车-拖车系统的响应。
解:设冲击时卡车与拖车间联接件来不及发生变形,从而冲击结束时系统运动的初始条件为
\[\boldsymbol{u}(0)=\boldsymbol{0},\quad \dot{\boldsymbol{u}}(0)=\begin{bmatrix}F_{0}/m_{1} & 0\end{bmatrix}^{T} \tag{a}
\]
根据例2.3.4中的分析,系统的运动是如下刚体位移与弹性振动的叠加
\[\begin{align*}
\boldsymbol{u}(t)&=\boldsymbol{\varphi}_{1}(a_{1}+b_{1} t)+\boldsymbol{\varphi}_{2}(a_{2} \cos\omega_{2} t+b_{2} \sin\omega_{2} t)\\
&=\boldsymbol{\Phi}\left\{\begin{bmatrix}1 & 0\\0 & \cos\omega_{2} t\end{bmatrix}\boldsymbol{a}+\begin{bmatrix}t & 0\\0 & \sin\omega_{2} t\end{bmatrix}\boldsymbol{b}\right\}
\end{align*} \tag{b}
\]
其中
\[\omega_{2}=\sqrt{\frac{m_{1}+m_{2}}{m_{1} m_{2}}k},\quad
\boldsymbol{\Phi}=\begin{bmatrix}1 & 1\\1 & -\dfrac{m_{1}}{m_{2}}\end{bmatrix} \tag{c}
\]
将式(b)代入初始条件(a)得
\[\boldsymbol{u}(0)=\boldsymbol{\Phi}\boldsymbol{a}=\boldsymbol{0},\quad
\dot{\boldsymbol{u}}(0)=\boldsymbol{\Phi}\begin{bmatrix}1 & 0\\0 & \omega_{2}\end{bmatrix}\boldsymbol{b}
=\begin{bmatrix}F_{0}/m_{1}\\0\end{bmatrix} \tag{d}
\]
由式(d)及固有振型矩阵 \(\boldsymbol{\Phi}\) 可逆,解出
\[\boldsymbol{a}=\boldsymbol{0},\quad
\boldsymbol{b}=
\begin{bmatrix}1 & 0\\0 & \dfrac{1}{\omega_{2}}\end{bmatrix}
\begin{bmatrix}1 & 1\\1 & -\dfrac{m_{1}}{m_{2}}\end{bmatrix}^{-1}
\begin{bmatrix}\dfrac{F_{0}}{m_{1}}\\0\end{bmatrix}
=\frac{F_{0}}{m_{1}+m_{2}}
\begin{bmatrix}1\\\dfrac{m_{2}}{m_{1} \omega_{2}}\end{bmatrix} \tag{e}
\]
故系统运动为
\[\boldsymbol{u}(t)=\boldsymbol{\Phi}\begin{bmatrix}t & 0\\0 & \sin\omega_{2} t\end{bmatrix}\boldsymbol{b}
=\frac{F_{0}}{m_{1}+m_{2}}
\begin{bmatrix}
t+\dfrac{m_{2}}{m_{1} \omega_{2}}\sin\omega_{2} t\\
t-\dfrac{1}{\omega_{2}}\sin\omega_{2} t
\end{bmatrix} \tag{f}
\]
根据上式,读者可讨论拖车质量 \(m_2\) 和连接器刚度 \(k\) 对缓和拖车所受冲击的影响。