\(Data\ Fusion(数据融合)\)
\(eg:\)
\[\begin{align*}
&\begin{aligned}
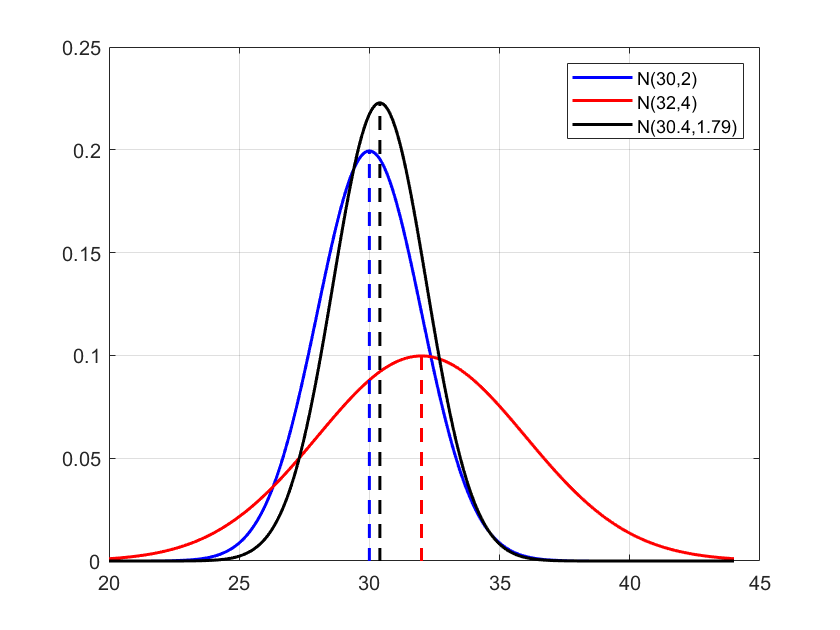
\color{blue}{z_1=30g,\sigma_1=2g;}\\
\color{red}{z_2=32g,\sigma_2=4g.}\\
\end{aligned}
\Rightarrow 符合Normal/Gaussian \ Distribution (正态/高斯分布)\\
&估计真实值\hat{z}=?&\\
&\hat{z}={\color{blue}{z_1}}+K_k({\color{red}{z_2}}-{\color{blue}{z_1}}),K_k\in[0,1]\\
&K_k=0:\hat{z}={\color{blue}{z_1}};\\
&K_k=1:\hat{z}={\color{red}{z_2}}.\\
&求K_k使得\sigma_{\hat{z}}最小\Rightarrow方差Var(\hat{z})最小\\
&\begin{aligned}
\sigma_{\hat{z}}^2&=Var[z_1+K_k(z_2-z_1)]\\
&=Var(z_1+K_k z_2-K_k z_1)\\
&=Var[{\color{red}{\underline{(I-K_k)z_1}}}+{\color{red}{\underline{K_k z_2}}}] \Rightarrow 相互独立\\
&=Var[(I-K_k)z_1]+Var(K_k z_2)\\
&=(I-K_k)^2 Var(z_1)+K_k^2 Var(z_2)\\
&=(I-K_k)^2 \sigma_1^2 +K_k^2 \sigma_2^2\\
\end{aligned}\\
&\frac{d \sigma_{\hat{z}}^2}{d K_k}=-2(I-K_k) \sigma_1^2+2K_k\sigma_2^2 =0\\
即:&\\
&-\sigma_1^2+K_k \sigma_1^2 +K_k \sigma_2^2=0\\
&K_k(\sigma_1^2+\sigma_2^2)=\sigma_1^2\\
求:&\\
&K_k=\frac{\sigma_1^2}{\sigma_1^2+\sigma_2^2}\\
代入:&\\
&K_k=\frac{2^2}{2^2+4^2}=0.2\\
&\hat{z}={\color{blue}{30}}+0.2 \cdot ({\color{red}{32}}-{\color{blue}{30}})=30.4\\
则:&\\
&\sigma_{\hat{z}}^2=(1-0.2)^2\cdot2^2+0.2^2\cdot4^2=3.2\\
&\sigma_{\hat{z}}=\sqrt{3.2}\approx1.79 \\
\end{align*}
\]
\(Covariance\ Matrix(协方差矩阵)\)
$\rightarrow 方差和协方差在一个矩阵中表现出来\ \color{red}{\rightarrow 变量间的联动关系} $
\(eg:\)
| 球员 | 身高\((x)\) | 体重\((y)\) | 年龄\((z)\) |
|---|---|---|---|
| 瓦尔迪 | \(179\) | \(74\) | \(33\) |
| 奥巴梅扬 | \(187\) | \(80\) | \(31\) |
| 萨拉赫 | \(175\) | \(71\) | \(28\) |
| 平均 | \(180.3\) | \(75\) | \(30.7\) |
\[\begin{align*}
方差:&\\
\sigma_x^2&=\frac{1}{3}\cdot[(179-180.3)^2+(187-180.3)^2+(175-180.3)^2]=24.89&\\
\sigma_y^2&=\frac{1}{3}\cdot[(74-75)^2+(80-75)^2+(71-75)^2]=14\\
\sigma_z^2&=\frac{1}{3}\cdot[(33-30.7)^2+(31-30.7)^2+(28-30.7)^2]=4.22\\
协方差:&\\
Cov(x,y)&=\sigma_x\sigma_y=\sigma_y\sigma_x\\
&=\frac{1}{3}\cdot[(179-180.3)\cdot(74-75)+(187-180.3)\cdot(80-75)+(175-180.3)\cdot(71-75)]\\
&=18.7 \Rightarrow结果{\color{red}{>0}},为{\color{red}{正相关}}\\
Cov(x,z)&=\sigma_x\sigma_z=\sigma_z\sigma_x=4.4\\
Cov(y,z)&=\sigma_y\sigma_z=\sigma_z\sigma_y=3.3\\
P&=
\begin{bmatrix}
\sigma_x^2 & \sigma_x\sigma_y & \sigma_x\sigma_z \\
\sigma_y\sigma_x & \sigma_y^2 & \sigma_y\sigma_z \\
\sigma_z\sigma_x & \sigma_z\sigma_y & \sigma_z^2 \\
\end{bmatrix}
=
\begin{bmatrix}
24.89 & 18.7 & 4.4 \\
18.7 & 14 & 3.3 \\
4.4 & 3.3 &4.22\\
\end{bmatrix}\\
\end{align*}
\]
\(求过渡矩阵:\)
\[\begin{align*}
a&=
\begin{bmatrix}
x_1 & y_1 & z_1 \\
x_2 & y_2 & z_2 \\
x_3 & y_3 & z_3 \\
\end{bmatrix}
-\frac{1}{3}
\begin{bmatrix}
1 & 1 & 1 \\
1 & 1 & 1 \\
1 & 1 & 1 \\
\end{bmatrix}
\begin{bmatrix}
x_1 & y_1 & z_1 \\
x_2 & y_2 & z_2 \\
x_3 & y_3 & z_3 \\
\end{bmatrix}&\\
P&=\frac{1}{3}a^Ta
\end{align*}
\]
\(State\ Space\ Representation(状态空间表达)\)
\(eg:\)
\[\begin{align*}
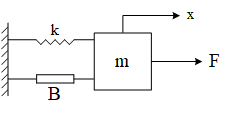
m\ddot{x}+B\dot{x}+kx&=F{\color{blue}{\ \rightarrow(u:Input)}}\\
state(状态变量):&\\
x_1=x,x_2&=\dot{x}\\
&\Downarrow\\
\dot{x}_1=x_2,\dot{x}_2&=\ddot{x}=\frac{1}{m}u-\frac{B}{m}\dot{x}-\frac{k}{m}x=\frac{1}{m}u-\frac{B}{m}x_2-\frac{k}{m}x_1&\\
Measurement&(测量量):\\
z_1=x&=x_1(位置),z_2=\dot{x}=x_2(速度);\\
\Rightarrow
&\begin{cases}
\begin{bmatrix}
\dot{x}_1 \\
\dot{x}_2 \\
\end{bmatrix}
=
\begin{bmatrix}
0 & 1 \\
-\frac{k}{m} & -\frac{B}{m} \\
\end{bmatrix}
\begin{bmatrix}
x_1 \\
x_2\\
\end{bmatrix}
+
\begin{bmatrix}
0 \\
\frac{1}{m} \\
\end{bmatrix}
u\\
\begin{bmatrix}
z_1\\
z_2\\
\end{bmatrix}
=
\begin{bmatrix}
1 & 0 \\
0 & 1 \\
\end{bmatrix}
\begin{bmatrix}
x_1 \\
x_2 \\
\end{bmatrix}
\end{cases}\\
\color{blue}{\Rightarrow 连续:}
&\color{blue}{\begin{cases}
\dot{X}(t)=AX(t)+Bu(t)\rightarrow随时间的变化\\
Z(t)=HX(t)\\
\end{cases}}\\
\color{brown}{\Rightarrow 离散:}
&\color{brown}{\begin{cases}
X_k=AX_{k-1}+Bu_{k-1}\\
Z_k=HX_k\\
\end{cases}}\\
下标k,k-1&,k+1代表一个时间单位,即Sample\ Time(采样时间)\\
存在{\color{red}{不确定性}}:&\\
&\begin{cases}
X_k=AX_{k-1}+Bu_{k-1}+{\color{red}{w_{k-1} \rightarrow Process\ Noise(过程噪音)}} \\
Z_k=HX_k+{\color{red}{v_k \rightarrow Measurement\ Noise(测量噪音)}} \\
\end{cases}
\end{align*}
\]