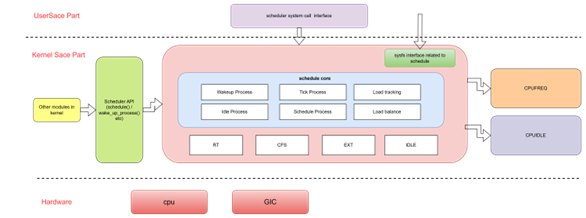
调度Core是调度的核心框架,它负载调度整个过程的框架,而不同的调度类负责填充调度core的回调接口,做最终不同调度类的调度决定。
调度类分类
目前的调度类从优先级依次下降为:
- stop调度类
最高优先级调度类,不会被抢占。通常task migration等线程使用该调度类 - deadline调度类
实时调度类,用户态可以通过setscheduler将某个线程调度策略设置为SCHED_DEADLINE。优先级小于0。 - realtime调度类
Rt调度类的线程优先级[-1, 99],其调度策略分为SCHED_FIFO和SCHED_RR - fair调度类
Fair调度类的线程优先级[100, 139], 其调度策略分为SCHED_NORMAL - ext调度类
ext调度类的线程优先级[100, 139], 其调度策略分为SCHED_EXT - idle调度类
最低优先级调度类,idle线程使用。只有在没有其他线程可调用时才会调用idle线程。Idle线程优先级为140。
设置调度类的时机
不同线程的调度类被设置的时机不一样:
- stop/idle调度类时在内核初始化过程中静态设置的
- 可以通过sched_setscheduler()设置线程的调度策略
- 子线程继承父线程的优先级,在sched_fork()根据prio范围设置rt/fair/ext调度类
调度类回调函数
调度core为调度的框架,负责提供用户态/内核态的框架,包含唤醒过程、调度过程、时钟处理、IDLE过程、负载跟踪和负载均衡等。但每个调度类的具体实现即真正的调度决定则在具体调度中的回调函数中实现。
具体的调度类填充由DEFINE_SCHED_CLASS()来定义。
void (*enqueue_task)(struct rq *rq, struct task_struct *p, int flags)
将task放入到运行队列中
void (*dequeue_task)(struct rq *rq, struct task_struct *p, int flags)
将task出队列
void (*yield_task)( )(struct rq *rq)
放弃当前运行队列上的task的运行
void (*yield_to_task)( struct rq *rq, struct task_struct *p)
判断是否当前CPU给p运行
void (*wakeup_preempt)( struct rq *rq, struct task_struct *prev, int flags)
如果有必要,抢占当前的task
int (*balance)( struct rq *rq, struct task_struct *prev, struct rq_flags *rf)
在选择下一个task运行之前,某些情况(如使能SCX)会调用balance做负载均衡
Struct task_struct *(*pick_task)( struct rq *rq)
Struct task_struct (pick_next_task)( struct rq *rq, struct task_struct *prev)
选择下一个task运行,两者实现其中一个
Void (*put_prev_task)( struct rq *rq, struct task_struct *p, struct task_struct *next)
Void (*set_next_task)( struct rq *rq, struct task_struct *p, bool first)
设置cfs_rq->curr,负载计算
Int (*select_task_rq)(struct task_struct *p, int task_cpu, int flags)
为task选择CPU运行
Void (*migrate_task_rq)(struct task_struct *p, int new_cpu)
将task迁移到新的CPU上
Void (*task_woken)(struct rq *this_rq, struct task_struct *task)
Void (*set_cpus_allowed)( struct task_struct *p, struct affinity_context *ctx)
为task设置亲和性
Void (*rq_online)(struct rq *rq)
Void (*rq_offline)( struct rq *rq)
在CPU online/offline时被调用
Struct rq *(*find_lock_rq)(struct task_struct *p, struct rq *rq)
在CPU stop时被调用,仅RT和DL调度类被填充,用于寻找最闲的rq
Void (*task_tick)( struct rq *this_rq, struct task_struct *task, int queued)
调度周期性时钟达到时被调用,周期性更新负载、重新调度等
Void (*task_fork)(struct task_struct *p)
在fork时被调用,仅CFS调度类被填充,设置允许最大capacity
Void (*task_dead)(struct task_struct *p)
在完成context_switch后若状态为DEAD时被调用,仅CFS调度类被填充
Void (*switching_to)(struct rq *this_rq, struct task_struct *task)
Void (*switched_from)(struct rq *this_rq, struct task_struct *task)
Void (*switched_to)(struct rq *this_rq, struct task_struct *task)
用于rt_mutex实现优先级继承逻辑,在task优先级发生变化时被调用。若task的调度类发生变化,在dequeue出来后设置新的调度类后调用switching_to(),在enqueue后先调用switched_from将原来task disable,再调用switched_to
Void (*reweight_task)( struct rq *this_rq, struct task_struct *task, const struct load_weight *w)
在设置nice或设置调度系统调用或Init_task初始化时被调用,用于设置负载权重
Void (*prio_changed)(struct rq *this_rq, struct task_struct *task, int oldprio)
在设置task优先级不改变调度类时被调用
Void (*update_curr)(struct rq *rq)
系统调用getrusage用于获取当前进程的资源情况。该接口在统计Cpu time时会被用来更新当前task的runtime统计。
Void (*task_change_group)(struct task_struct *p)
在不同group中移动时被调用
Void (*task_is_throttled)(struct task_struct *p, int cpu)
判断task是否throttled。Throttled task指的是RQ或cgroup的配额runtime用完,暂时禁止被运行知道bandwidth重新获取。
调度涉及的过程概括
- 旧的线程(prev线程)在调度时机会主动或被动让出CPU,这个过程成为调度过程;
- 在prev线程让出CPU后,从CPU的runqueue中按调度策略选择其他的线程new线程运行,这个过程成为调度切换过程;
- 在prev线程满足资源条件或其他条件时被其他线程唤醒,选择合适的CPU,并加入到对应的队列中,这个过程成为选核或唤醒过程;
- 选核时可能会根据各个CPU的繁忙情况选择合适的CPU,这时就要求系统能够跟踪负载。当不同CPU上负载差距比较大,在何时的时机会进行负载均衡;
- 在CPU上没有其他task运行时,CPU会进入idle状态,运行idle线程,idle有不同的级别,进入idle并选择哪个idle级别,这个过程为Idle过程
- CPU支持不同的频点,如何选择不同的频率并调频,这个过程为Cpufreq过程
- 在特定调度时机,包括主动时机和被动时机:主动调度时机比如线程主动调用schedule()或sleep()或cond_resched()等让出CPU;被动时机比如在系统调用从内核态返回用户态,在PREEMPT抢占内核在中断结束时