动态规划精进篇:当终点在“世界之外”——出界的路径数 - 教程
哈喽,各位小伙伴们,我是前端小L。
在上一篇激动人心的 文章 中,我们首次将“约束条件”(油量)融入DP状态,成功解决了一个抽象的图路径问题。那次经历,让我们掌握了DP思维的“升维”武器。
今天,我们将趁热打铁,带着这把锋利的武器,重返我们熟悉的“二维网格”战场。但这次的任务极其特殊:我们的目标不再是地图上的任何一个点,而是要想尽办法逃离这个世界——走出边界!这是一个看似简单,却能完美展现“DP状态设计”艺术的绝佳问题。
话不多说,直接开始~
力扣 576. 出界的路径数
https://leetcode.cn/problems/out-of-boundary-paths/
题目分析:
地图:还是老朋友
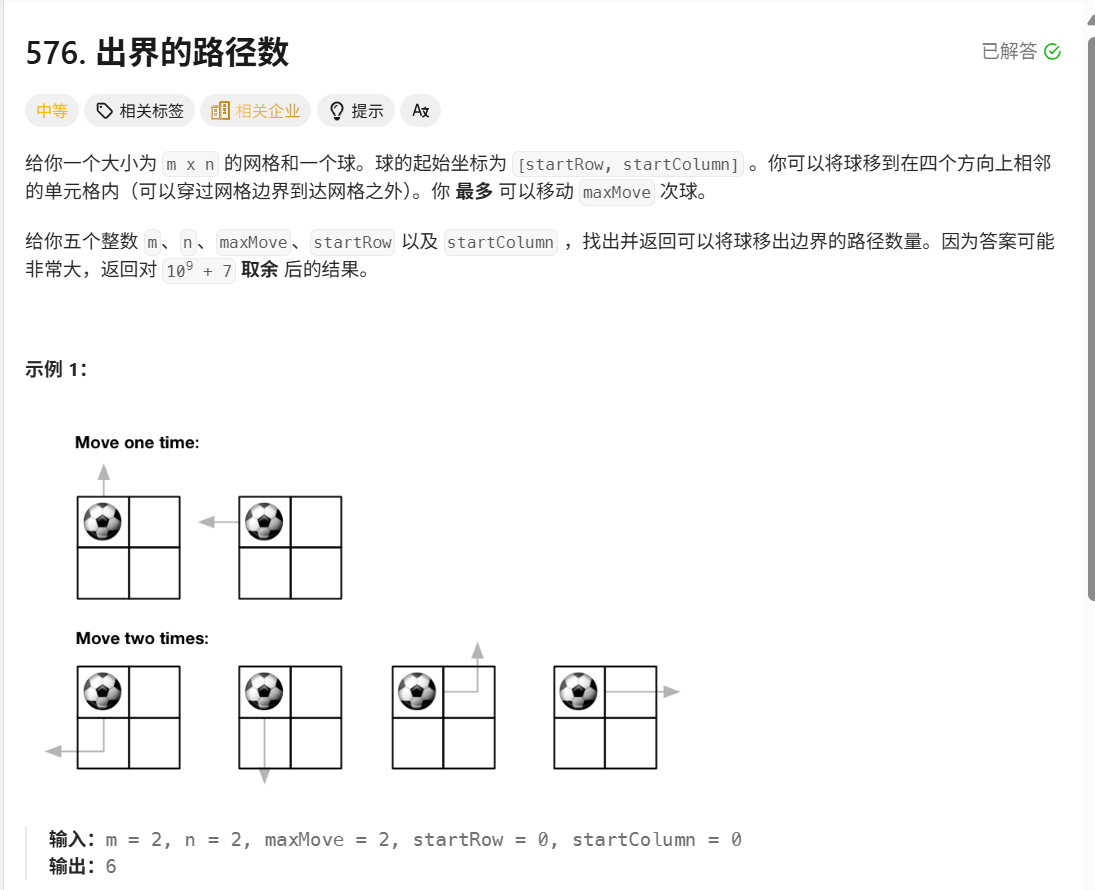
m x n网格。玩家:一个放在
(startRow, startColumn)的小球。行动力:最多可以移动
maxMove次,每次可以向上下左右四个方向移动一格。胜利条件:在
maxMove步之内(或刚好用完),将小球移出网格边界。目标:计算所有可能“出界”的路径总数,结果取模。
这个问题完美地融合了我们之前学过的知识点:它有“网格”的形态,同时又有一个类似“油量”的约束条件——“剩余步数”。这简直是为我们量身定做的练习题!
思路一:再次请出“记忆化搜索”这位老朋友 (自顶向下DP)
面对这种“从A点出发,走K步,有多少种可能”的问题,最符合直觉的永远是递归(深度优先搜索)。
1. 定义递归函数: 我们需要一个函数来回答这个核心问题:“我现在在 (i, j),还剩 k 步,请问有多少种方法可以出界?” dfs(i, j, k)
2. 寻找递归的终点(Base Cases):
成功终点:当我们发现当前位置 (i, j) 已经在边界之外时 (i < 0 或 i >= m 或 j < 0 或 j >= n),说明我们已经成功“越狱”了!这是一条合法的出界路径,我们返回 1。
失败终点:如果我们步数用完了 (k == 0),但人还在网格里,那就再也无法出界了。这是一条失败的路径,返回 0。
3. 状态转移(递归逻辑): 如果不在终点,我们就尝试从 (i, j) 向四个方向移动。假设移动到邻居 (ni, nj),那么问题就变成了“从 (ni, nj) 出发,还剩 k-1 步,有多少种方法可以出界?”。这不就是调用 dfs(ni, nj, k-1) 吗! 所以,dfs(i, j, k) 的结果,就是它四个方向的邻居的 dfs 结果之和。
4. 记忆化“升维”: 和上一题一样,朴素的DFS会因为大量重复的 (位置, 剩余步数) 状态而超时。我们需要一个备忘录来记录算过的结果。 这个状态由三个变量定义:行 i,列 j,剩余步数 k。 所以,我们的DP数组必须是三维的! dp[k][i][j]:表示从 (i, j) 出发,还剩 k 步的情况下,出界的路径总数。
代码实现 (自顶向下DP):
class Solution {
public:int findPaths(int m, int n, int maxMove, int startRow, int startColumn) {// dp[k][i][j]: 从(i,j)出发,剩k步,出界的路径数// 初始化为-1表示未计算dp.resize(maxMove + 1, vector>(m, vector(n, -1)));this->m = m;this->n = n;return dfs(maxMove, startRow, startColumn);}
private:vector>> dp;int m, n;int mod = 1e9 + 7;int dirs[4][2] = {{-1, 0}, {1, 0}, {0, -1}, {0, 1}}; // 四个方向int dfs(int k, int i, int j) {// Base Case 1: 成功出界if (i < 0 || i >= m || j < 0 || j >= n) {return 1;}// Base Case 2: 步数用尽,失败if (k == 0) {return 0;}// 记忆化:如果算过,直接返回if (dp[k][i][j] != -1) {return dp[k][i][j];}long long count = 0;// 状态转移:探索四个方向for (auto& dir : dirs) {count = (count + dfs(k - 1, i + dir[0], j + dir[1])) % mod;}// 写入备忘录并返回return dp[k][i][j] = count;}
}; 思路二:自底向上,从“0步”构建到“K步” (迭代DP)
自顶向下的方法很直观,但自底向上的迭代法往往能带来更深的理解和更好的性能。
1. 重新定义 dp 数组含义:dp[k][i][j] 表示:通过恰好 k 步,从起点走到 (i, j) 的路径总数。
2. 初始化: 在 k=0 时,我们哪里也没去,就在起点。所以 dp[0][startRow][startColumn] = 1。其他所有 dp[0][i][j] 均为 0。
3. 状态转移方程: 要用 k 步走到 (i, j),我们必须在 k-1 步时,位于 (i, j) 的某个邻居 (pi, pj)。 所以,dp[k][i][j] 的值,等于所有邻居在 k-1 步时的路径数之和。 dp[k][i][j] = dp[k-1][i-1][j] + dp[k-1][i+1][j] + dp[k-1][i][j-1] + dp[k-1][i][j+1] (注意处理边界)
4. 如何计算最终答案? 最终答案是所有“出界”路径的总和。一条路径在什么时候算作出界? 当我们在第 k 步,位于某个边界格子 (i, j) 时,下一步就会出界。 所以,我们可以在计算完每一轮 k 的 dp 表后,遍历整个网格。对于每一个格子 (i, j),如果 dp[k][i][j] 大于0,我们就看看它往四个方向走,有多少个方向是出界的,然后把 dp[k][i][j] 累加相应次数到最终结果 ans 中。
5. 空间优化: 我们注意到,计算第 k 步的状态,只依赖于第 k-1 步。这又是我们熟悉的“滚动数组”优化信号!我们可以把三维dp[k][i][j]压缩成两个二维数组 current_dp[i][j] 和 prev_dp[i][j]。
代码实现 (自底向上DP + 空间优化):
class Solution {
public:int findPaths(int m, int n, int maxMove, int startRow, int startColumn) {int mod = 1e9 + 7;// dp[i][j]: 当前步数下,到达(i,j)的路径数vector> dp(m, vector(n, 0));dp[startRow][startColumn] = 1;long long ans = 0;int dirs[4][2] = {{-1, 0}, {1, 0}, {0, -1}, {0, 1}};// 迭代 k 从 0 到 maxMove - 1 步for (int k = 0; k < maxMove; ++k) {vector> temp_dp(m, vector(n, 0));for (int i = 0; i < m; ++i) {for (int j = 0; j < n; ++j) {// 如果当前格子在上一步可达if (dp[i][j] > 0) {for (auto& dir : dirs) {int ni = i + dir[0];int nj = j + dir[1];// 如果下一步出界了if (ni < 0 || ni >= m || nj < 0 || nj >= n) {ans = (ans + dp[i][j]) % mod;}// 如果还在界内else {temp_dp[ni][nj] = (temp_dp[ni][nj] + dp[i][j]) % mod;}}}}}dp = temp_dp; // 更新dp表为下一步的结果}return ans;}
}; 总结:DP状态的“时间”维度
这篇文章,我们再次实践了“升维思考”。
在上一题中,我们将“ 资源约束(油量)”加入了状态。
在这一题中,我们将“ 时间约束(剩余步数)”加入了状态。
这揭示了DP状态设计的又一个强大武器:当问题的解与过程中的某一步(第k步)强相关时,“步数”或“时间”本身,就可以作为DP的一个维度。
我们对DP的理解,已经从二维平面,扩展到了包含“约束”或“时间”的三维甚至多维状态空间。我们不再是单纯的寻路者,而是能够在时空中穿梭,计算所有可能性的“时空规划师”!
恭喜你,完成了这次高质量的思维训练。动态规划的世界浩瀚无垠,但只要掌握了这种分析状态、定义维度的方法,再复杂的问题也能被我们层层剖析。
如果觉得这篇文章对你有所帮助,别忘了免费的点赞关注加收藏,同时欢迎大家订阅动态规划这一专栏的内容持续性地去学习!咱们下期见~