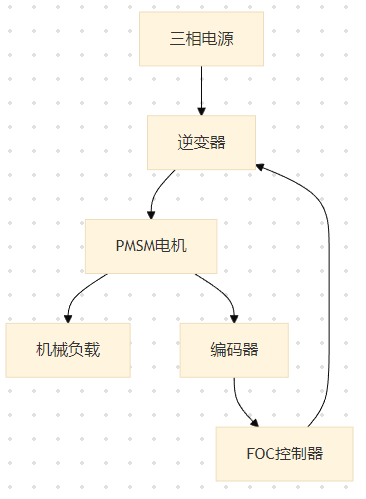
一、系统架构设计
FOC控制系统的核心模块包括:
- 电机模型:永磁同步电机(PMSM)或感应电机(IM)的数学模型
- 逆变器模型:三相全桥逆变器及PWM调制模块
- 坐标变换模块:Clarke/Park变换与反变换
- 控制器模块:双闭环PI控制器(电流环+速度环)
- 传感器模型:编码器/霍尔传感器反馈模块
- 负载模型:模拟实际工况的机械负载
二、详细建模步骤(以PMSM为例)
1. 电机参数配置
% 电机参数定义(参考)
pole_pairs = 4; % 极对数
R = 0.5; % 相电阻 (Ω)
Ld = 0.01; % d轴电感 (H)
Lq = 0.01; % q轴电感 (H)
J = 0.001; % 转动惯量 (kg·m²)
B = 0.0001; % 黏性摩擦系数
2. 逆变器建模
- 使用
Three-Phase Inverter模块 - 配置开关频率(如10kHz)
- 添加死区补偿模块
3. 坐标变换实现
% Clarke变换模块配置
clarke_block = 'Simscape/Electrical/Power Systems/Measurements/Clarke';
add_block(clarke_block, '模型路径/Clarke_Transform');% Park变换模块配置
park_block = 'Simscape/Electrical/Control/Field-Oriented Control/Park';
add_block(park_block, '模型路径/Park_Transform');
4. 控制器设计
% 电流环PI参数(参考)
Kp_i = 5; % 电流环比例增益
Ki_i = 0.5; % 电流环积分增益% 速度环PI参数
Kp_w = 10; % 速度环比例增益
Ki_w = 1; % 速度环积分增益% 生成SVPWM调制信号
svpwm_block = 'Simscape/Electrical/Power Electronics/SVPWM';
5. 传感器建模
% 编码器配置(参考)
encoder = 'Simscape/Electrical/Sensors/Quadrature Encoder';
set_param(encoder, 'Resolution', '2048'); % 2048线编码器
三、关键参数配置
1. 仿真设置
set_param('模型名', 'StopTime', '0.5'); % 仿真时间0.5秒
set_param('模型名', 'Solver', 'ode23tb'); % 刚性求解器
set_param('模型名', 'FixedStep', '1e-6'); % 固定步长1μs
2. 电机初始化
% 初始状态设置
initial_condition = struct(...'Speed', 0, % 初始转速 (rad/s)'Position', 0, % 初始电角度 (rad)'i_d', 0, % d轴电流初始值 (A)'i_q', 0); % q轴电流初始值 (A)
3. 负载特性
% 恒转矩负载模型
load_torque = @(t) 50 * sin(2*pi*5*t); % 50N·m正弦波动负载
四、仿真结果分析
1. 关键波形观测
- 转速跟踪曲线:验证速度环响应速度(参考)
- 电流谐波分析:通过FFT观察THD(总谐波畸变率)
- 转矩波动:评估控制精度
2. 性能指标计算
% 动态响应指标计算
overshoot = (peak_speed - setpoint)/setpoint * 100; % 超调量
settling_time = find(t > 0.1 & t < 0.2, 1); % 稳定时间
3. 典型问题排查
- 电流振荡:检查Park变换相位对齐
- 转矩脉动:优化电流环PI参数
- 速度超调:调整前馈补偿系数
五、高级功能实现
1. 弱磁控制扩展
% 弱磁控制逻辑(参考)
if id_ref > id_maxiq_ref = sqrt(id_max^2 - id_ref^2);enable_flux_weakening = 1;
end
2. 温度补偿模块
% 铜损温度补偿
R_temp = R * (1 + 0.0039*(T-25)); % 温度系数0.0039/℃
3. 多电机协同控制
% 主从电机同步控制
sync_signal = phase_lock(master_encoder, slave_encoder);
六、代码生成与硬件部署
1. 嵌入式代码生成
% 配置代码生成选项
set_param('模型名', 'TargetLang', 'C');
set_param('模型名', 'CodeGenTarget', 'ert.tlc');
2. 硬件接口配置
% F28379D芯片配置(参考)
set_param('模型名', 'HardwareBoard', 'LAUNCHXL-F28379D');
set_param('模型名', 'ADCOffsetCalibEnable', '1');
3. 实时调试技巧
- 使用Simulink Coder生成DLL接口
- 通过串口发送实时数据到PC端
- 使用Scope模块捕获硬件运行数据
六、学习资源推荐
-
官方网页
- Simulink电机控制示例库 mathworks.com/help/physmod/simscape/examples/motor-control.html
- Halcon图像处理手册 mvtec.com/support/manuals/halcon/en/
-
项目
- FOC的Simulink仿真模型 youwenfan.com/contentcnl/95714.html
通过本方案,开发者可以系统掌握FOC控制在Simulink中的实现方法,从基础建模到高级优化均有详细指导。建议结合具体硬件平台进行验证,并持续优化控制参数以适应实际工况需求。